Проект робота-машинки и мобильного приложения для управления им стрелками на экране или с помощью акселерометра смартфона с Android через WiFi по протоколу UDP. При управлении акселерометром вращаем смартфон по оси X и оси Y. От вращения по оси Y робот поворачивает влево или вправо. При вращении по оси X робот едет вперед (тихо, средне, быстро), едет назад или останавливается (при горизонтальном положении смартфона). Для проекта использовались NodeMCU (ESP8266) и L298N. Робот программировался в среде ArduinoIDE. Мобильное приложение сделано в среде MIT App Inventor 2. В MIT App Inventor было добавлено бесплатное клиентское расширение UDP (UrsAI2UDPv3), с этим расширением дополнительного внешнего приложения-отправителя UDP не требуется.
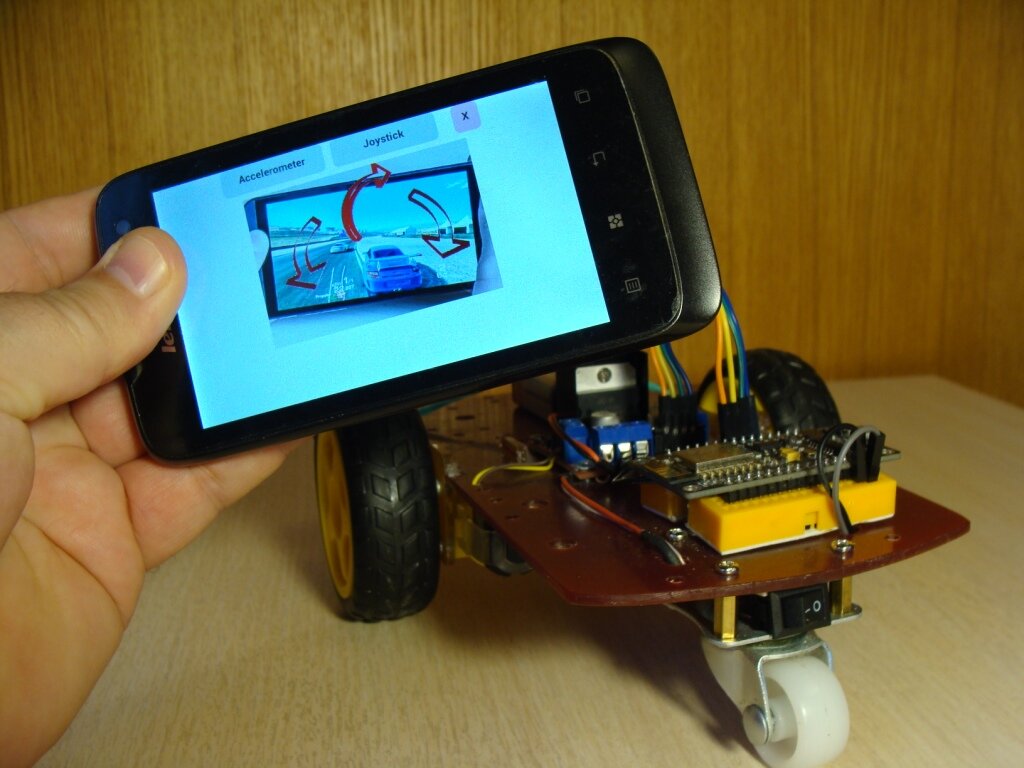
Проект робота-машинки и мобильного приложения для управления им стрелками на экране или с помощью акселерометра смартфона с Android через WiFi по протоколу UDP. При управлении акселерометром вращаем смартфон по оси X и оси Y. От вращения по оси Y робот поворачивает влево или вправо. При вращении по оси X робот едет вперед (тихо, средне, быстро), едет назад или останавливается (при горизонтальном положении смартфона).
Для проекта использовались NodeMCU (ESP8266) и L298N. Робот программировался в среде ArduinoIDE. Мобильное приложение сделано в среде MIT App Inventor 2. В MIT App Inventor было добавлено бесплатное клиентское расширение UDP (UrsAI2UDPv3), с этим расширением дополнительного внешнего приложения-отправителя UDP не требуется.