Исследовательская группа из Института робототехники Университета Бэйхай разработала нового многофункционального шестиногого робота 🤖, который универсально двигает всеми конечностями.
Робот может не только двигаться, но и манипулировать предметами. По словам авторов, сегодня растет спрос на гибких роботов, которые легко захватывают объекты и передвигаются с ними. Если у робота есть ноги, то для перемещения предметов ему потребуется дополнительная рука — такая конструкция повышает стоимость, она менее эффективна и недостаточно гибкая.

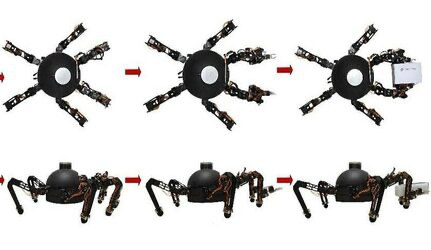
Поэтому авторы новой работы представили конструкцию, основанную на механизме конечностей, который оснащен различными конечными эффекторами для улучшения рабочих характеристик. Новинку назвали ALLOMAN (образовано от Arm-Leg Locomotion and Manipulation – «передвижение и манипулирование руками и ногами»). Он может не только двигаться, но и манипулировать предметами во время движения. Это повышает уникальность и эффективность разработки и позволяет выиграть время.
Пока что ALLOMAN hexapod — это экспериментальный прототип. На следующем этапе работы авторы собираются внедрить в него больше функций для манипулирования. Авторы планируют использовать свою разработку в областях, где нужны многофункциональные платформы, например, для обеспечения безопасности города, борьбы с терроризмом и исследования планет.