
Драйвер шагового двигателя TB6600 - это профессиональный драйвер двухфазного шагового двигателя. Он поддерживает управление скоростью и направлением. Вы можете установить его микрошаг и выходной ток с помощью 6 DIP-переключателей.
Всего существует:
- 7 видов микрошагов (1, 2 / A, 2 / B, 4, 8, 16, 32)
- 8 видов регулирования тока (0,5 А, 1А, 1,5 А, 2А, 2,5 А, 2,8 А, 3,0 А, 3,5 А).
Все сигнальные клеммы имеют высокоскоростную изоляцию оптрона, что повышает их способность противостоять высокочастотным помехам.
Особенности:
Поддерживает 8 уровней текущего контроля:
- Поддерживает 7 уровней микрошаговый регулировки
- Интерфейсы используют высокоскоростную изоляцию оптрона
- Теплоотвод большой площади
- Способность к защите от высокочастотных помех
- Входная защита от обратного хода
- Защита от перегрева, перегрузки по току и короткого замыкания
- Электрические характеристики:
- Входной ток: 0-5.0А
- Выходной Ток: 0,5-4,0А
- Мощность (макс.): 160 Вт
- Микрошаг: 1, 2/A, 2/B, 4, 8, 16, 32
- Температура: -10~45℃
- Влажность: Отсутствие Конденсации
- Вес: 0,2 кг
- Размеры: 96x56x33 мм
Контакты:
Подходит для различных малых и средних средств автоматизации оборудования и инструментов, таких как: гравировальный станок, маркировочный станок, станок для резки, лазерный набор текста, плоттеры, станки с ЧПУ, обработка устройств.
Входной сигнал:
- PUL+ сигнал шага +
- PUL- сигнал шага -
- DIR+сигнал направления +
- DIR-сигнал направления -
- EN+Включение автономного управления +
- EN-Включение автономного управления –
- Подключение обмоток мотора:
- А+Шаговый двигатель A+
- A-Шаговый двигатель A-
- В+Шаговый двигатель B+
- B-Шаговый двигатель B-
- Подключение питания:
- VCC "+"
- VCC (DC9-42V) "+"
- GND "-"
- GND "-"
Инструкции по подключению
Существует три входных сигнала:
- 1-Ступенчатый импульсный сигнал PUL +, PUL-;
- 2-Сигнал направления DIR +, DIR-;
- 3-Включить сигнал EN +, EN-.
Драйвер поддерживает схемы с общим катодом и общим анодом, вы можете выбрать одну из них в соответствии с вашими требованиями.
Соединение с Общим Анодом:
Подключите PUL+, DIR + и EN + к источнику питания системы управления. Если источник питания составляет + 5 В, его можно подключить напрямую. Если напряжение источника питания превышает + 5 В, необходимо добавить внешний токоограничивающий резистор R, чтобы гарантировать, что вывод контроллера может выдавать ток 8-15 мА для управления внутренней оптронной парой.
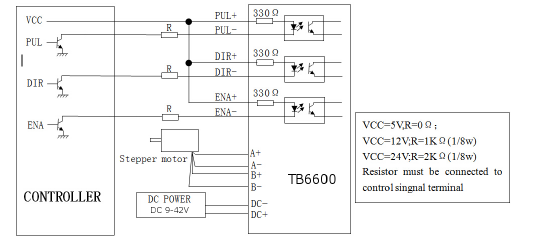
Импульсный сигнал подключается к PUL-; сигнал направления подключается к Dir- ; Сигнал включения подключается к EN-. Как показано ниже:
Подключите PUL -, DIR - и EN - к клемме заземления системы управления. Импульсный сигнал подключается к PUL+; сигнал направления подключается к Dir+; Сигнал включения подключается к EN+. Как показано ниже:
Примечание: Когда “EN” находится в подключено , двигатель находится в свободном состоянии (автономный режим). В этом режиме вы можете отрегулировать положение вала двигателя вручную. Когда “EN” находится не подключено, двигатель будет находиться в режиме автоматического управления.
Подключение микроконтроллера
Ниже приведено соединение с общим анодом (“EN” не подключено).
Примечание: Всегда отключайте питание при подключении и убедитесь, что полярность питания правильная. Или это приведет к повреждению контроллера.
Настройки DIP-переключателя
Настройка Микрошага:
В следующей таблице показаны настройки микрошага драйвера TB6600. Первые 3 DIP-переключателя используются для установки микрошагов. Угол шага = Угол шага двигателя / Микрошаг, например, шаговый двигатель с углом шага 1,8 °, конечный угол шага в разделе “Микрошаг 4” будет 1,8 ° / 4 = 0,45 °
Настройка тока двигателя:
Примечание: Как правило, терминал EN подключают когда нужно управление частотным преобразователем, вернее его управления из программы.