Для тех, кто хочет узнать чуть больше о том, как устроены различные датчики структурсканера, как они работают и в чем их различия. Как развивается технология.
Возможно, вы видели рентгеновский снимок датчика StructureScan HD, который гулял в соцсетях, вызывая бурные обсуждения по поводу его устройства? Меня завалили вопросами по этому поводу.


Тема действительно интересная. Попробуем разобраться на столько, насколько это возможно при имеющейся в открытых источниках информации.
Устройство оборудования и алгоритмы его работы являются коммерческой тайной производителя. В такой высоко конкурентной среде, как рыбопоисковое и навигационное оборудование, хранение своих секретов весьма актуально. Производители щепетильно относятся к своим разработкам и часто судятся по этому поводу. Получить исчерпывающую информацию невозможно.
Сбор информации для этой статьи оказался не тривиальной задачей. Собранная информация очевидно не полна, а где-то может быть даже не точна. Исходя из публичной информации о разработках компании, можно судить о вариантах изготовления тех или иных датчиков. Сопоставив даты выхода разработок и оборудования, а также конструктивные особенности, я получил общее представление о принципах работы и устройстве датчиков StructureScan.
Прошу учитывать, данная статья подготовлена только на основе открытых источников информации, а также то, что производитель может вносить изменения в конструкцию своего оборудования.
Я не являюсь разработчиком подобных систем или специалистом в гидроакустике. Думаю, специалистам в этой области материал покажется очень простым, примитивным, а местами даже неточным и грубым. Прошу не судить строго.
Основные принципы работы датчиков
В преобразователях датчиков эхолотов используется пьезоэлектрический эффект. Чувствительный элемент (преобразователь) датчика деформируется под давлением звуковой волны, что приводит к возникновению электрического напряжения, которое снимается приемником. Это прямой эффект. При обратном эффекте, напряжение, приложенное к элементу, деформирует его с определенной частотой, что в свою очередь вызывает механические колебания воды.
Важно также знать, пьезоэлектрические вещества, из которых изготавливается чувствительный элемент, обладают одновременно и прямым, и обратным пьезоэффектом. Поэтому не обязательно в одном датчике использовать два элемента. Как минимум, нужен один, который будет и передавать, и принимать, отраженный от объектов подводного мира, сигнал.
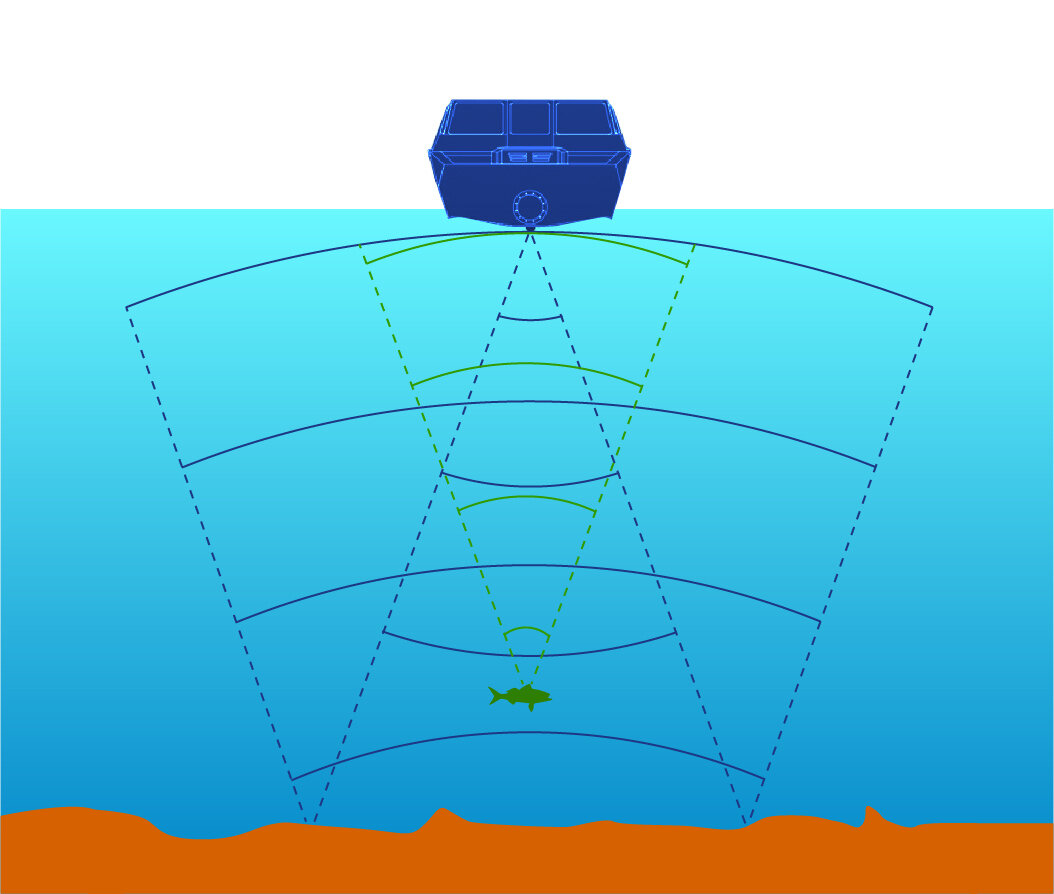
Поток звуковых колебаний посылается датчиком. Звуковая волна распространяется в воде, отражаясь от объектов в толще воды и от донных поверхностей. Отражённые колебания возвращаются, попадая на чувствительный элемент. Полученные данные обрабатываются процессором и выводятся на экран.
Отразится сигнал от объекта под водой или инет зависит от размера объекта и длины звуковой волны. Чем выше используемая датчиком частота, тем меньше длина волны и меньше размер объекта, от которого отразится сигнал, а значит детальнее изображение на экране. Также нужно знать, что если размер объекта равен длине волны, то волна полностью отразится от него. Если размер объекта на порядок (в 10 раз) меньше, то волна полностью огибает объект. Длина волны на разных частотах представлена в таблице.
Другой важный параметр – затухание. С ростом частоты растет затухание сигнала, поэтому, чем выше частота, тем меньше расстояние сканирования.
Так на частоте 400кГц затухание составляет около 0,04 дБ/м, а на частоте 1,3 МГц уже около 1,1 дБ/м! На начальном этапе развития структурсканеров производители увеличивали частоту для повышения детализации изображения. Однако, растущее затухание не позволяет пользоваться этим методом до бесконечности.
Далее углубляться не будем. Этого будет достаточно для понимания последующего материала.
StructureScan HD
Типичный преобразователь создает диаграмму направленности в виде сигнала, который исходит от небольшого источника и затем расширяется при удалении от источника. Например, круговой преобразователь (цилиндрический кристалл с круговой поверхностью) обычно создает коническую форму с вершиной конуса, расположенной в источнике.
Исторически сложилось так, что эти типы гидролокационных систем с цилиндрическим пьезоэлементом в первую очередь анализировали толщу воды под лодкой. С появлением технологий бокового обзора рыбакам была предоставлена возможность рассматривать не только толщу воды под судном, но и просматривать воду по обеим сторонам на значительном удалении.
Гидролокаторы бокового обзора (ГБО) по разному проектируются и работают с разным уровнем разрешения. Многие системы ГБО привлекли внимание общественности к их работе в местах расположения знаменитых кораблекрушений и для предоставления очень подробных изображений океанского дна, но такие системы являются дорогостоящими и сложными. В некоторых случаях ГБО разрабатываются с использованием многолучевых гидролокационных систем. Такие многолучевые гидролокационные системы обычно состоят из множества относительно узко сфокусированных обычных круговых преобразовательных элементов, которые расположены рядом друг с другом для создания массива узко сфокусированных смежных конических лучей, которые вместе обеспечивают непрерывную диаграмму направленности. Многолучевые ГБО требуют очень сложных систем для поддержки множества преобразователей, что значительно увеличивает их стоимость.
Были разработаны керамические элементы бокового обзора с лучом направленным в одну сторону от судна. Соответственно, две стороны покрываются двумя элементами. Эти элементы имеют прямоугольную форму, а не круговую, как обычные.
Для технологии нижнего сканирования, также поначалу использовалось несколько цилиндрических элементов, но они обеспечивали изображение относительно низкого качества.
В 2009 г. компания Lowrance получила патент на преобразователи прямоугольной формы для целей нижнего сканирования, которыми в настоящий момент пользуются и другие компании. Примерно в это же время был представлен датчик StructureScan HD, который объединил в себе технологии бокового и нижнего сканирования с использованием этих преобразователей.
В корпус датчика StructureScan HD встроено три преобразователя вытянутой прямоугольной формы, каждый из которых, выполнен так, что ширина луча в направлении продольном длине элемента значительно меньше, чем в поперечном направлении. Два элемента направлены в стороны по бокам, один вниз под лодку. Каждый из преобразователей может принимать и передавать звуковой сигнал.
Технология бокового обзора и нижнего сканера StructureScan HD использует две частоты на выбор – 455 кГц или 800 кГц. На частоте 455 кГц выше дальность обзора и больше глубина сканирования. На частоте 800 кГц изображение более высокого разрешения на небольшом расстоянии от лодки и небольших глубинах. Пользователь может выбрать, что важнее на данный момент, дальность обзора или четкость изображения.
TotalScan
Чтобы избежать влияния интерференции (наложение звуковых волн одной частоты от разных источников, вызывающее усиление или ослабление колебаний в разных точках среды) Lowrance разработал схему с одним излучающим преобразователем с широкой диаграммой направленности.
При данной архитектуре боковые преобразователи только принимают сигнал, а нижний работает как на передачу, так и на прием.
Также, в один корпус был добавлен классический круглый принимающий/передающий преобразователь.
Судя по всему, такая схема применена в датчике TotalScan. Датчик предоставляет возможность одновременно пользоваться технологиями сканирования на высоких частотах 455 и 800 кГц и классическим сонаром 83 и 200 кГц, а также High и Medium CHIRP.
StructureScan 3D
В то время, как традиционные боковые сканеры используют только по одному преобразователю по обе стороны для приема боковых лучей, технология StructureScan 3D использует, по меньшей мере, два преобразователя на каждую сторону. Во избежание помех между преобразователями каждый из них расположен в параллельных монтажных пазах из поглощающего материала в едином корпусе из отражающего материала. Прямоугольные преобразователи в массиве располагаются на заданном расстоянии друг от друга. Для приема и передачи могут использоваться сразу несколько преобразователей в различных комбинациях.
Точное количество элементов, их размер, расстояние между ними, используемые на данный момент, к сожалению, мне не известно. По имеющимся у меня данным их может быть до 12 штук в одном датчике.
На данный момент StructureScan 3D использует только одну частоту 455 кГц. На 455 кГц достигается невероятно широкий обзор при очень высокой детализации благодаря избыточности принимаемых данных от нескольких преобразователей.
Архитектура датчика StructureScan 3D:
1. Позволяет использовать методы интерферометрии для получения полноценного трёхмерного изображения поверхности дна.
2. Позволяет одновременно реализовать функционал:
- построение 3D-изображения,
- построение изображения классического 2D бокового обзора,
- построение классического изображения нижнего сканера,
- поиск и выделение рыбы в 3D-режиме.
3. Использование нескольких сеток данных с разных принимающих преобразователей при построении изображения классических 2D-сканеров на частоте 455 кГц позволяет:
- увеличить детализацию изображения на всем диапазоне бокового сканирования без повышения частоты, которое привело бы к снижению дальности обзора,
- увеличить детализацию изображения нижнего сканера без сокращения глубины сканирования,
- увеличить дальность бокового обзора. Практический порог в условиях р. Волга составляет 100 м в одну сторону в теплой чистой воде,
- низкая зависимость дальности обзора от глубины и большая ширина обзора на малых глубинах менее 4 м,
- более четкое изображение в мутной воде.
Для того, чтобы наглядно проследить эволюцию изображения технологии StructureScan посмотрим на скриншоты одного и того же места на Волге под Самарой, сделанные в 2014 и в 2018 гг. Скриншоты сделаны на одной и той же частоте – 455 кГц.
Для примера рассмотрим еще несколько скриншотов с использованием датчика StructureSсan 3D.
На мой взгляд, в настоящий момент датчик StructureSсan 3D из представленных на рынке рыбопоисковой электроники наиболее эффективен. Для детального поиска рыбы, ее видовой идентификации, понимания микроструктур и жесткости дна он обеспечивает высокое качество изображение классических 2D-сканеров на очень большом расстоянии сканирования и глубине. Понимание макроструктур, рельефа дна и поиск стайных скоплений обеспечивает комбинация 2D и 3D изображения.
Технические возможности датчика StructureScan 3D заложенные конструкционно, судя по всему, еще полностью не использованы. Lowrance продолжает совершенствовать программное обеспечение. Весной 2018 г вышло обновление, значительно повысившее четкость изображения. Ждем, что еще предложит Lowrance в новых версиях ПО. Например, датчик 3D может значительно расширить возможности построения батиметрических карт, в частности карт глубин, в режиме реального времени.