Сейчас прохожу курс Applied Nonlinear Control и получаю нереальное удовольствие. Теорию контроля вполне можно назвать самым мужественным разделом математики. Сюжет решаемых задач можно описать метафорой:
Ты в незнакомом месте, и на тебя нападает ящер. Схватив тварь в нужный момент, в нужном месте и приложив нужное количество усилий ты её побеждаешь. Стабилизируешь эту динамическую систему применив необходимый контроль. Достигаешь желаемого состояния системы. Искусство в том чтобы вычислить нужное время, место и количество усилий.
Испытываю восторг когда из какой-то серой непонятной информации получается делать выводы и точно предсказывать что произойдёт. Магия.
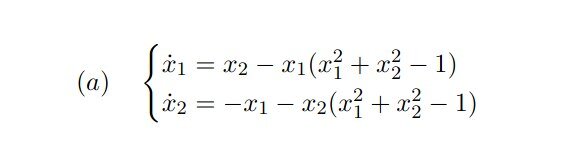
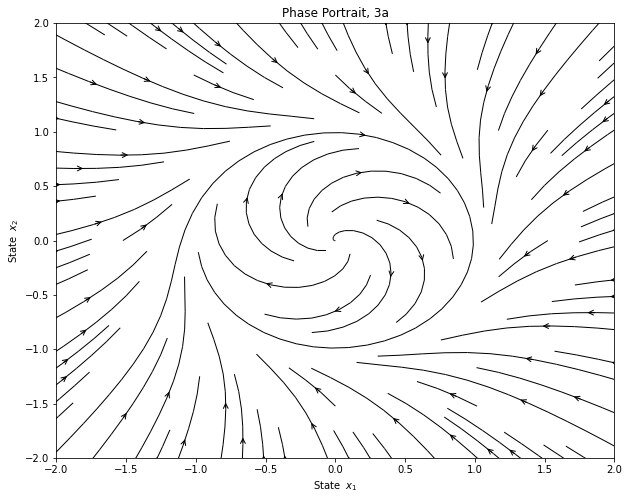
Например, вот такая система не зависимо от начальных x1 и x2 всегда будет стремиться к одной и той же стабильной орбите на картинке в начале поста. Кто бы мог подумать?