Краны-манипуляторы на автомобильном шасси часто используются для перемещения грузов. Во многих случаях эти грузы имеют значительную массу, воздействующую со значительной силой на различные части крана. Узнайте, как с помощью моделирования можно определить влияние этих сил и оптимизировать работу крана.
Мобильность и грузоподъемность
Конструкция кранов позволяет поднимать и опускать грузы, слишком тяжелые для человека. Во многих областях применения этих машин — от строительства до обслуживания линий электропередач — полезным преимуществом также является мобильность. Краны-манипуляторы можно легко передвигать в различных направлениях, а также перевозить по автомобильным дорогам, что позволяет избежать затрат на дополнительное транспортное оборудование.

Краны подобного типа оснащаются несколькими гидравлическими цилиндрами, управляющими перемещением манипулятора, а также множеством других механизмов. При перемещении тяжелых грузов на компоненты крана воздействуют значительные силы. Используя моделирование, мы сможем исследовать воздействие этих сил на кран во время его работы и определить способы улучшения его эксплуатационных характеристик путем оптимизации конструкции.
Исследование твердого тела на примере крана-манипулятора
Модель крана-манипулятора исследует силы, действующие на цилиндры и шарнирные соединения крана при его эксплуатации, используя возможности модулей Динамика многотельных систем и Механика конструкций. Импортированная из модели CAD геометрия крана состоит из 14 частей, передвигающихся относительно друг друга.
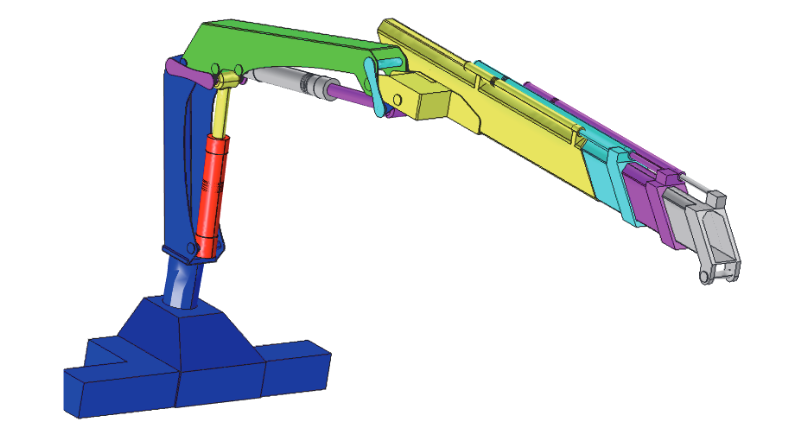
На рисунке ниже представлен более подробный обзор рычажных механизмов крана. После рисунка приводится таблица, содержащая описание отдельных компонентов.
В данном примере к крану приложены две нагрузки: собственный вес, направленный в отрицательном направлении по оси z, и полезная нагрузка в 1000 кг, приложенная к его оконечности. Рабочий цикл включает поднятие груза из удаленного положения и его перемещение под стрелу крана. Сначала груз перемещается вверх, а затем — по направлению к крану. График ниже изображает траекторию оконечности крана в течение рабочего цикла.
Фактически кран управляется посредством изменения длины трех цилиндров: цилиндра внутренней секции стрелы, цилиндра внешней секции стрелы и цилиндров телескопического механизма. Цилиндр внутренней секции стрелы обеспечивает ее поднятие, цилиндр внешней секции стрелы регулирует величину угла между внутренней и внешней секциями, а цилиндры телескопического механизма регулируют вылет стрелы. Поскольку это более удобно, в данном случае в качестве параметров используются углы наклона секций стрелы, а не длины цилиндров.
Результаты
На изображении ниже представлено 9-е положение рабочего цикла, в котором угол между внутренней секцией стрелы и горизонталью составляет 45°, угол между внутренней и внешней секциями стрелы составляет –30°, общий вылет составляет 1,5 м.
Теперь рассмотрим воздействие нагрузок на различные части крана. На каждом из представленных ниже графиков номер решения соответствует положению крана. В первоначальном положении кран поднимает груз с помощью удлиненной стрелы, а затем, в решении, соответствующем последнему положению, опускает груз рядом с собой.
Начнем с сил, воздействующих на цилиндры, управляющие положением стрелы. В данном случае силы сжатия имеют положительное направление. Когда перемещаемый груз расположен далеко от основания крана, силы, воздействующие на цилиндры, будут больше по величине, как и можно было предположить. Наибольшая величина силы во время рабочего цикла определяет требуемые характеристики цилиндра.
На следующем графике показаны силы, воздействующие на цилиндры телескопического механизма. Как и в предыдущем примере, сила сжатия имеет положительное направление. Цилиндры внутренней секции рассчитаны на более высокие нагрузки, поскольку им необходимо перемещать вес телескопических сегментов на большее расстояние.
И наконец, мы можем наблюдать силы, действующие на шарниры между основными частями крана. Этот же способ может использоваться для исследования сил, воздействующих на соединения между любыми частями крана. Представленные ниже результаты полезны для определения конструкционных размеров подобных компонентов.
Выделение определенного механизма в системе
Теперь мы можем использовать модуль Оптимизация для улучшения характеристик рычажного механизма крана. Для этого можно использовать модель Optimization of a Crane Link Mechanism (Оптимизация рычажного механизма крана), которая является продолжением модели Truck Mounted Crane (Кран-манипулятор). В этом случае основное внимание уделяется снижению усилия на цилиндре, необходимого для перемещения определенного груза в условиях наихудшего сценария цикла нагрузки.
Таблица ниже содержит наименования всех используемых в модели компонентов, а также их цветовые обозначения.
Поскольку данный пример предназначен для испытания конструкции в условиях наихудшего сценария, рабочий цикл выбирается таким образом, чтобы рычажный механизм испытывал максимально возможную нагрузку. Для этого внутренняя секция стрелы поднимается в крайнее верхнее положение, телескопические элементы выдвигаются на максимальную длину, а угол внешней секции стрелы выбирается таким образом, чтобы обеспечить максимальное удаление оконечности крана. При этом используются нагрузки из исходной модели.
В рамках решения данной задачи оптимизации можно изменять положения трех осей. Первая ось соединяет первый рычаг с основанием, вторая — второй рычаг со стрелой, третья — два рычага с поршнем гидравлического цилиндра.
Сравнение конструкций
Теперь сравним наши результаты. На первом графике показано изменение усилия на цилиндре во время рабочего цикла. В данном случае мы сравниваем его максимальное значение в течение рабочего цикла для определения грузоподъемности цилиндра.
По сравнению с исходной конструкцией оптимизированный вариант позволил снизить максимальное усилие с 597 кН до 413 кН, что составляет 31% — значительное улучшение! Это позволяет увеличить допустимую нагрузку; кроме того, снижение усилия облегчает выполнение критериев по напряжению для рычажного механизма.
На втором графике представлены y- и z-компоненты, а также величина силы, воздействующей на ось, образующую шарнир между основанием и стрелой. Как видно из представленных ниже результатов, результирующая сила в исходной конструкции выше, чем в оптимизированном варианте.
Выводы и загрузка модели
В состав пакета COMSOL Multiphysics версии 5.0 мы включили две новые модели, предназначенные для исследования взаимодействий между различными компонентами крана-манипулятора и оценки роли методов оптимизации в улучшении их эксплуатационных характеристик. Данные примеры иллюстрируют возможности моделирования в части исследования воздействия нагрузок на подобные сложные механические системы, а также то, как полученные знания позволяют улучшить их конструкцию.
Загрузить модель можно здесь:
#наука #физика #технологии #программы #численные методы #fem #comsol