Для сборки квадрокоптера я буду использовать покупную раму HSKRC HX230, данная рама имеет ряд полезных плюсов, один из них это возможность установки модулей с крепежом 30х30 мм в 2-х местах, например модуль питания, и полетный компьютер посередине, а видео-передатчик, в задней части:

В данном квадрокоптере будет использоваться внешние драйверы моторов, в связи с чем был куплен модуль питания Iflight SucceX 2-8S PDB:
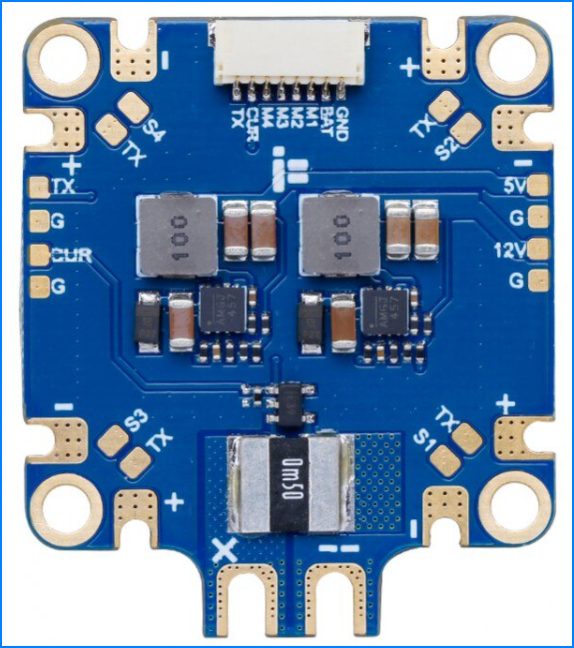
Данный модуль имеет возможность питать полетный компьютер напряжением +5 вольт, при подключении батареи от 2S до 8S, имеется возможность использовать токовый шунт, для измерения тока нагрузки, с последующей передачи этой информации на вывод "CURR".
Выводы BAT и GND выдают питание +5 вольт, которые предназначены для питания полётного компьютера.
Выводы M1,M2,M3,M4 соединены с выводами S1,S2,S3,S4 для управления скоростью вращения моторами.
Вывод TX соединен со всеми остальными выводами TX, и используется если драйвера моторов позволяют использовать дополнительный канал управления.
В качестве полетного компьютера будет использован контроллер Mamba F405MK2:
Соединить модуль питания и полетный компьютер можно с помощью шлейфа который идет с модулем питания, или полётником, но есть небольшой нюанс!!! Вывод для определения силы тока, и дополнительный вывод управления драйверами мотора, у данных модулей имеет другую последовательность, а значит у разъема необходимо поменять местами пару проводов (желтый и зелёный):
Подключение моторов к драйверам сделал таким образом:
Что позволило поменять направление вращения путём изменения местами первого и второго провода.
Можно было конечно перепрограммировать и сами драйвера, но это требует больше телодвижений, которые было лень делать.
В итоге начал вырисовываться вот такой квадрокоптер:
В следующей статье опишу подключение TBS nano к полётному контроллеру.