При помощи своего искусственного интеллекта (ИИ) марсоход «Персеверанс» пытается преодолеть большее расстояние, чем любой из его предшественников. На пути ему встречаются ямы, кратеры и поля с острыми камнями, по которым марсоходу придется передвигаться самостоятельно. В конце пятикилометрового путешествия, начавшегося 14 марта 2022 года, «Персеверанс» достигнет дельты древней реки в пределах кратера Езеро, где миллиарды лет назад существовало озеро.
Эта дельта — одно из лучших мест на Марсе для поиска следов внеземной жизни. Используя дрель на конце роборуки и сложную систему сбора образцов в корпусе, марсоход собирает керны горных пород для возвращения на Землю — первая часть кампании по возврату образцов на Марс.
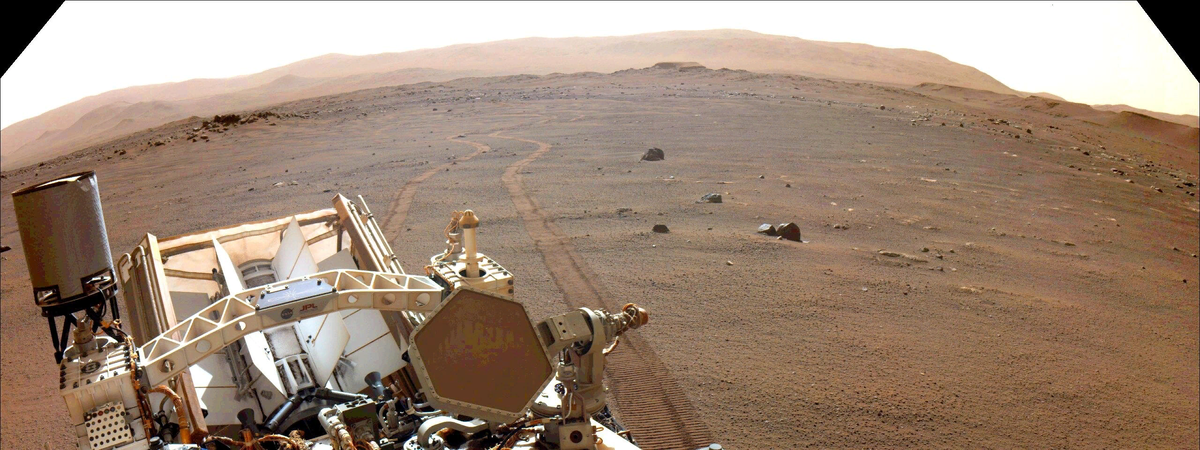
По словам Кена Фарли из Калифорнийского технологического института (сотрудник проекта «Персеверанс»), дельта настолько важна, что учёные решили сосредоточить все силы на управлении марсоходом, чтобы побыстрее добраться до места назначения. Во время этой поездки учёные сделают множество снимков дельты, и чем ближе они подойдут, тем более впечатляющими будут итоговые изображения.
Научная группа будет искать на сделанных фото камни, представляющие наибольший интерес для изучения через инструменты марсохода. Они также будут искать наилучшие маршруты, по которым марсоход может подняться на дельту примерно на высоту 40 метров.
Но сначала стоит проявить настойчивость. Ровер движется к цели, используя автономную систему AutoNav, которая уже установила рекорд пройденного пути. Все марсоходы НАСА обладают подобными системами, но AutoNav «Персеверанса» — лучшая из них.
Возглавляющий миссию разработчик Марк Маймон из Лаборатории реактивного движения НАСА утверждает, что процессы автономного вождения, занимающие на аппаратах типа «Оппортьюнити» до нескольких минут, на «Персеверансе» обрабатываются за секунды. Поскольку благодаря усовершенствованной системе автономного вождения марсоход стал быстрее, исследователи могут обойти большую территорию, чем когда они программировали каждый привод.
На Земле группа экспертов из 14 человек записывает команды и отправляет их на Марс. «Персеверанс» получает их и отправляет обратно данные, чтобы специалисты могли подтвердить прогресс марсохода. Для выполнения некоторых задач требуется несколько дней, как в случае с недавней поездкой, которая охватывала около 510 метров и включала тысячи отдельных команд. Некоторые приводы требуют большего участия человека, чем другие. AutoNav полезен для поездок по ровной местности с простыми препятствиями, например, большими камнями и склонами, которые марсоходу легко обнаружить и обойти.
AutoNav отражает эволюцию инструментов для автономного вождения, ранее разработанных для марсоходов НАСА «Спирит», «Оппортьюнити» и «Кьюриосити». Усовершенствованную систему отличает машинное зрение на основе ИИ, позволяющее снимать и обрабатывать снятые марсоходом изображения прямо во время движения. На основе анализа этих изображений марсоход принимает решение о движении. Этот валун слишком близко? Сможет ли он пройти над этим камнем, не задев его дном? Что, если колеса ровера соскользнут?
«Персеверанс» обладает более современными камерами, позволяющими оперативно делать снимки для их обработки в режиме реального времени. В отличие от своих предшественников, марсоход имеет отдельный компьютер для обработки изображений. Он основан на универсальном, сверхэффективном микрочипе с FPGA (Field-Programmable Gate Array, Программируемая логическая матрица). FPGA отлично подходит для работы с машинным зрением. По словам Маймона, на предыдущих марсоходах вся информация обрабатывалась на одном и том же компьютере, из-за чего системы серьёзно тормозили. Теперь же системе автономного вождения «Персеверанса» не приходится делиться вычислительными ресурсами с более чем сотней других задач.
Естественно, люди не полностью абстрагируются от управления марсоходом. Специалисты по-прежнему планируют основной маршрут, используя изображения, полученные во время таких миссий, как Mars Reconnaissance Orbiter НАСА. Они отмечают препятствия, такие как потенциальные песчаные ловушки, которых следует избегать, обозначая зоны «держаться подальше» и «не входить», которые помогают марсоходу ориентироваться.
Система автономного вождения марсохода «Кьюриосити» держит его в условном пузыре безопасности диаметром 16 метров. Если система заметит скалы, находящиеся друг от друга на расстоянии около 4,5 метров, марсоход остановится и обойдёт их, вместо того чтобы попытаться пройти между ними. Система «Персеверанса» намного тоньше. Она способна обходить разбросанные по дну кратеров близко лежащие валуны или даже ездить по ним.
Предыдущие марсианские миссии продвигались намного медленнее. Теперь же AutoNav предоставляет учёным возможность перемещаться в те места, которые они считают наиболее приоритетными. Это означает, что миссия главным образом сосредоточена на своей основной цели — поиске образцов, которые ученые в конечном итоге захотят вернуть на Землю.