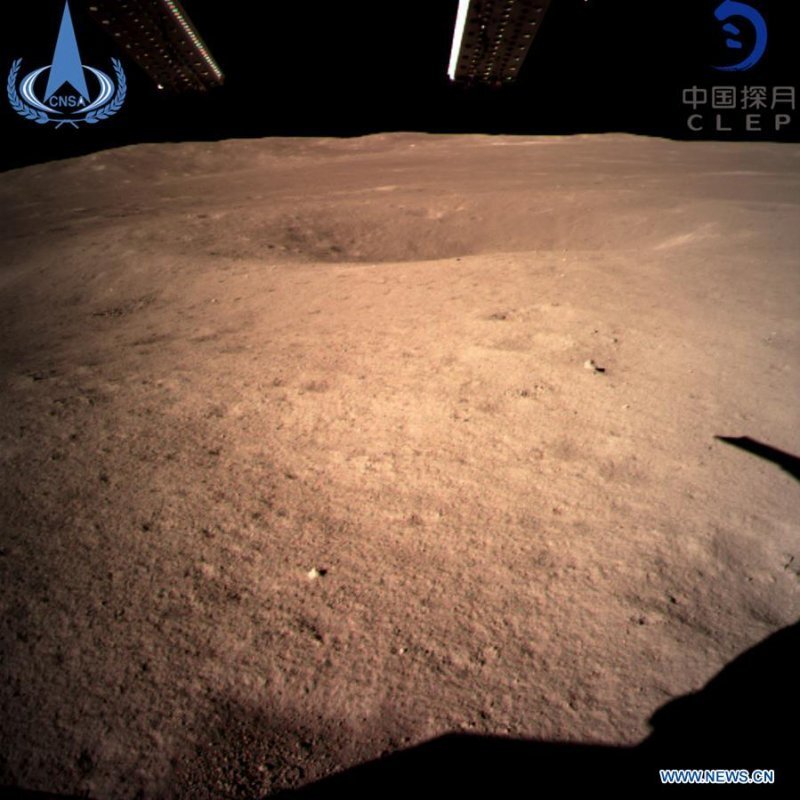
Китайский космический корабль «Чанъэ-4» приземлился на невидимой с Земли стороне Луны. Это первая миссия, когда-либо сделанная таким образом.
Посадочный модуль с марсоходом взлетел на ракете Długi Marsz 3B 7 декабря 2018 года . Ранее корабль был отправлен на орбиту вокруг нашего естественного спутника для связи с миссией на поверхности.
Зонд приземлился на поверхность Луны 3 января 2019 года в 3:26 по польскому времени в обозначенной зоне в районе бассейна Южный полюс-Эйткен.
Это четвертая лунная миссия Китая и самый амбициозный космический проект страны на сегодняшний день. Посадочный модуль весит 1200 кг, а марсоход — 140 кг. И посадочный модуль, и марсоход оснащены научными приборами, которые позволят изучить морфологическую поверхность Луны в районе приземления и ее геологию. Ожидается также, что миссия будет искать и оценивать изобилие ресурсов в районе приземления.
О процессе посадки
Заключительный этап посадки зонда длился двенадцать минут. Главной сложностью был рельеф выбранной местности – изрезанный горами и крутыми холмами. Зонд совершил почти вертикальную посадку (в отличие от параболического полета предыдущей китайской миссии).
Корабль сначала замедлился почти до нулевой скорости и начал под действием силы тяжести тянуться к лунной поверхности. На высоте двух километров камеры зонда отправили первые снимки поверхности, чтобы избежать наземных препятствий — удалось скорректировать траекторию полета.
На высоте ста метров над поверхностью зонд замедлил снижение, чтобы найти самое безопасное место для посадки в этом районе. После выбора спуск возобновился, и когда корабль оказался в двух метрах над лунной поверхностью, он выключил двигатели и упал на поверхность, облегчив приземление четырьмя ногами.
Погрузчик
При запуске миссии мы описали технику, которая летала в рамках миссии Chang’e 4 . Зонд оснащен научными приборами, созданными в сотрудничестве с другими странами. Есть место для низкочастотного спектрометра (LFS). Благодаря ему будут производиться радиометрические измерения свойств Солнца и плазменной среды над местом посадки зонда.
Посадочный модуль также оснащен экспериментом Lunar Lander Neutrons and Dosimetry (LND) для непрерывного мониторинга доз радиации и спектра линейной передачи энергии (LET) различными типами излучения на поверхности Луны. Устройство LND также сможет измерять потоки бомбардирующих частиц и их изменение во времени. Инструмент был создан в сотрудничестве с Германией.
На посадочном модуле также установлены две камеры: LCAM (посадочная камера) для фотографирования поверхности во время посадки и TCAM (Terrain Camera) для фотографирования окрестностей посадочного модуля.
Джип
Марсоход миссии Chang'e 4 также был оснащен множеством научных инструментов. Как и в случае с предыдущим аппаратом, здесь также был размещен лунный проникающий радар (LPR) для изучения лунного реголита и обнаружения геологических структур под поверхностью.
Марсоход оснащен усовершенствованным малым анализатором нейтралов (ASAN) для измерения электрически нейтральных атомов и положительных ионов в окружающей среде транспортного средства. Устройство было разработано в сотрудничестве со Швецией.
Спектрометр видимого света и ближнего инфракрасного диапазона VNIS будет использоваться для изучения состава вещества на лунной поверхности и поиска потенциальных природных ресурсов.
Также марсоход был оснащен панорамными камерами. Он также сможет осуществлять передачу видео в режиме реального времени. Автомобиль имеет подвеску, аналогичную той, что используется марсоходами НАСА.