Если мы имеем две покоящиеся и отстоящие друг от друга на расстоянии (а) системы координат S и S`, то, приняв систему S за исходную, установим соотношение между их величинами.
Очевидно, что для наблюдателя системы S начало координат системы S` и, следовательно, все её координатные точки (R`, t`) будут смещены на величину пропорциональную (а), и мы будем иметь:
S (А; tА ) (1)
S`(A` ) = Cta = а; (t`0 ) = ta = (а/C) , (2)
Построим соответствующую диаграмму (Рис. 6.3.1), где система S` находится в области регистрации системы S (это условие является незыблемым так как в противном случае система S` не будет существовать для системы S):
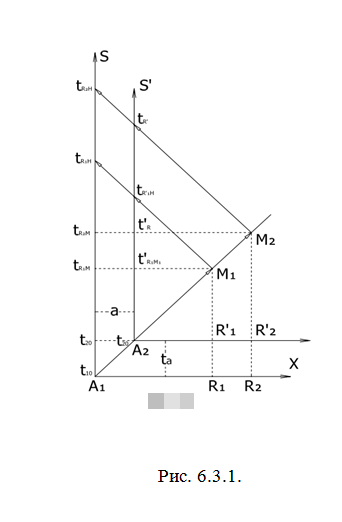
Если в основной системе S задана произвольная точка R1, (см. Рис. 6.3.1), то преобразования координат этой точки в системе S` будут:
R`1 = (R1 - a) и R1 = (R`1 + a), (3)
t`R`1 = (tR1 - tа) и tR1 = (t`R`1 + tа), (3а)
M1 = {(R1 - a) - (tR1 - ta)}. (3b)
[разложение на составляющие по осям мы показали в разделе 3, ч.1, ф. (8 ~ 16)].
Если же в системе S задана другая произвольная точка R2, то преобразования координат этой точки в системе S` будет:
R`2 = (R2 - a) и R2 = (R`2 + a), (4)
и
t`R`2 = (tR2 - ta) и tR2 = (t`R`2 + ta), (4а)
M2 = [(R2 - a) - (tR2 - ta)] (4b)
где
а =√{(ax)2 + (ay)2 + (az)2}; ta = (a/C). (5)
Так как [R2 = (R`2 + a) и R1 = (R`1 + a)]; [t2 = (t`2 + ta) и t1 = (t`1 + ta)], то отсюда следует:
(R2 - R1) = (R`2 - R`1) или (ΔR12) = (ΔR`12), (15)
(tR2 - tR1) = (t`R`2 - t`R`1) или (ΔtR12) = (Δt`R`12) (15a)
(ΔM2 - ΔM1) = (ΔM`2 - ΔM`1) (15b)
Следовательно, пространственные, временные и пространственно-временные интервалы в системах S и S` равны (15,15a,15b), т.е. инвариантны, а, значит, цикл сигнала взаимосвязи внутри каждой из систем будет замкнут, и время будет синхронно.
Однако формулы (4,14,4b), показывают, что (R2 # R`2), (R1 # R`1), а, значит, цикл сигнала взаимосвязи в случае межсистемных связей не будет замкнут, и время не будет синхронно.
Надо отметить, что наблюдатель системы S, находящийся в начале координат системы, зарегистрирует точку R в момент наблюдаемого времени (tН):
tH = (2RM/C) = (RH/C). (16)
Но поскольку наблюдаемое расстояние (RН) точки события (RM) всегда будет (2RМ), т.е. [RH = 2RM], то точке события [RМ = (RН/2)] всегда будет
Это различие между регистрируемыми и фактическими координатами события обусловлено тем, что сигналу взаимосвязи, для того, чтобы донести информацию до наблюдателя (в начало координат системы S) нужно вернуться в начало координат этой системы (к наблюдателю), на что требуется дополнительное время и путь. Именно поэтому необходимо разделить время на местное (tM) и наблюдаемое (tH).
Отметим так же, что и местное и наблюдаемое время события, происходящего на некотором расстоянии от начала координат покоящейся системы S, для её наблюдателя всегда являют событиями прошедшего времени, даже если они и отличаются от собственного времени (в начале координат) покоящейся системы на бесконечно малую величину.
(продолжение следует).
Интерактивный каталог для ориентировании в серии публикаций доступен по ссылке.