
Всем привет! В этой статье я хочу рассказать вам о самодельном гоночном коптере «Яростная Пчела». Поехали!
Характеристики
Время висения: около 20 минут
Размер рамы: 250 мм
Моторы: ReadyToSky 2205 2300Kv.
Аккумулятор: 4 банки 1300 mah
Полётный контроллер: SP Racing F3
Электронная мощность: 175 Вт
Тяговооруженность: 3.8
Полётный вес: 505 грамм.
Сборка
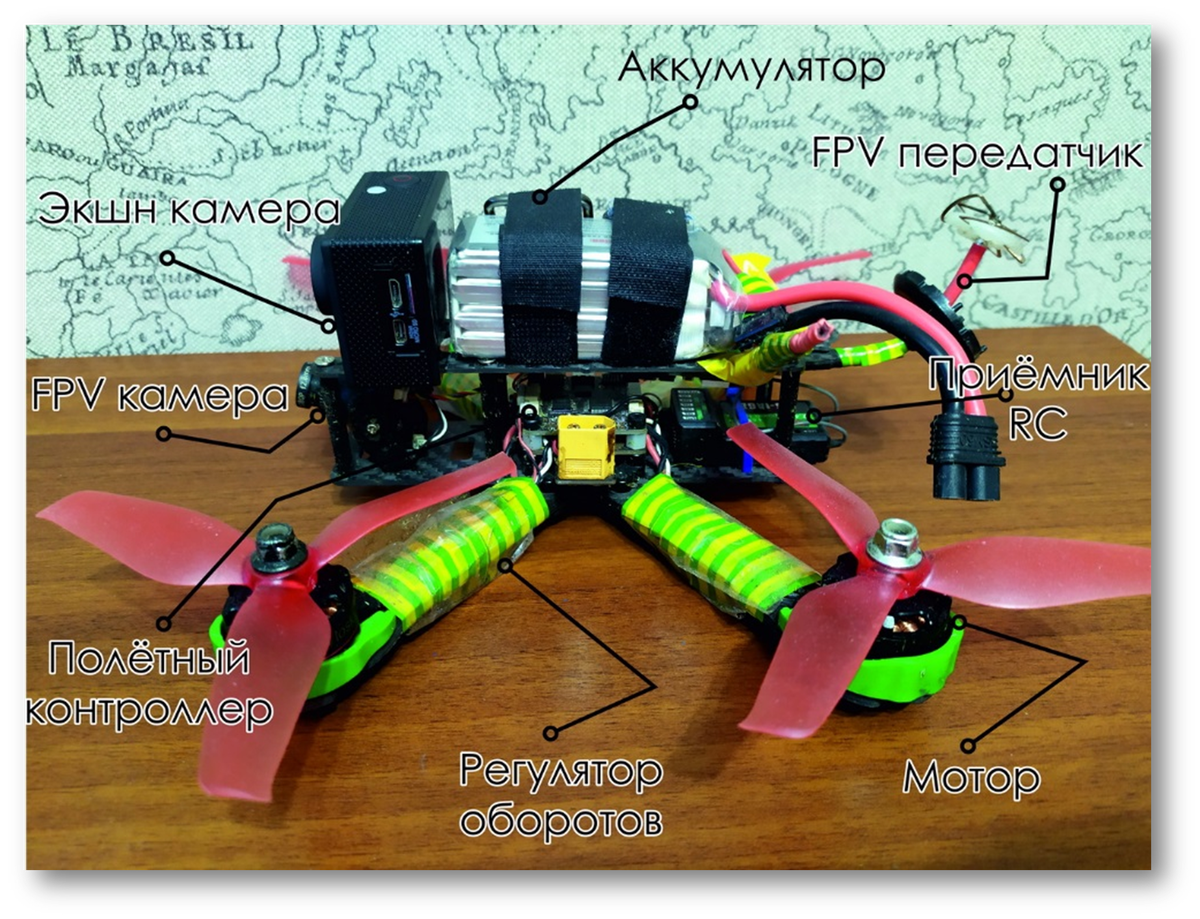
Для начала я собрал нижнюю часть карбоновой рамы. Затем установил на неё моторы и закрепил винты. К плате разводки питания припаял регуляторы оборотов и закрепил их к лучам рамы на изоленту. К регуляторам оборотов припаял провода с мотором и замотал место спайки изолентой для большей прочности. После этого я закрепил плату разводки питания на пластиковые винтики, а уже на них – полётный контроллер. К полётному контроллеру припаял сигнальные провода с регуляторов оборотов двигателя. Также к полётному контроллеру я припаял пищалку, но она не заработала. В передней части рамы я закрепил FPV камеру на винты с фиксатором. К передатчику FPV сигнала я припаял провода питания к плате разводки питания и сигнальные провода. Сигнальные провода подключил к камере. Затем я закрепил верхнюю часть рамы на ножки, и к задней её части закрепил передатчик FPV на двусторонний скотч и кабельную стяжку. К передатчику подключил грибовидную антенну, которая улучшит передачу видео. После этого на верхнюю часть рамы закрепил аккумулятор с помощью специальных затяжек.
В передней части верхней пластины рамы расположилось крепление для камеры, которая в свою очередь закреплена на хомуте. Благодаря этому можно снять не только камеру, но и само крепление. Приёмник аппаратуры управления был закреплён в задней части нижней пластины рамы квадрокоптера. Антенны закреплены под углом 90 градусов друг к другу и 45 градусов к горизонту, это улучшит скорость приёма радиосигнала.
Загрузка прошивки
Прошивку для данного квадрокоптера я загружал в программе Betaflight. Регуляторы оборотов настраивались в программе BLHeli Configurator. В процессе проверки работоспособности моторов в программе, возникла проблема. Один из моторов отказался работать. Я подумал, что дело в плохом подключении регулятора к полётному контроллеру, и вдруг квадрокоптер заискрился, что-то закоротило. Я скорее стал отключать аккумулятор, на разъём заел, и задача усложнилась. В итоге я еле-еле отключил аккумулятор из платы разводки, и коптер прекратил искрится…
Для решения проблемы мне пришлось почти полностью разобрать коптер и перепаять всё заново. Но тот самый мотор по-прежнему отказывался работать, а в программе BLHeli Configurator возникала ошибка при перепрошивке регулятора этого мотора. После некоторых манипуляций я понял, что нужно заменить полётный контроллер и регуляторы, пришлось заказывать новые, других у меня не было. Я всё заменил, переподключил, спаял, загрузил новую прошивку. И о чудо, всё заработало! Квадрокоптер был готов к полётам.
Первые полёты
Первый запуск я проводил в квартире, никаких проблем не возникало и коптер отлично управлялся. Затем мы выходили во двор и пробовали летать там. Летом открылся дачный сезон, рядом с дачей у нас есть поле и я стал учится летать уже по FPV. Квадрокоптер показал себя довольно крепким, несмотря на все мои падения, а их было довольно много.
Больше видео с пчелой вы можете найти туть.
Заключение
Вот такой коптер у меня получился. Если статья вам понравилась, ставьте лайк и подписывайтесь! На канале будет ещё много подобного. На этом у меня всё, до встречи!
#квадрокоптеры #моделизм