В середине 70-х годов 20 века в Московском институте инженеров сельскохозяйственного производства им. В.П. Горячкина был организован отдел сельскохозяйственной робототехники, так как возникла потребность в автоматизации сельскохозяйственных процессов.
К этому времени в промышленности уже работало несколько тысяч видов, хорошо себя зарекомендовавших автоматических манипуляторов. Казалось бы можно в сельское хозяйство приспособить и их. Но не тут то было. Сельхозроботы должны быть "умнее", то есть оснащены логическими устройствами более высокого уровня, им необходимо быть более подвижными и решать более широкий круг задач.
Прежде чем приступить к созданию модели робота, необходимо подробно изучить какие технологические операции робот должен выполнять. Допустим робот должен обслуживать свиноферму, допустим молодняк, надо его взвешивать, перемещать, кормить, следить за состоянием, дезинфицировать помещение. Вот часть вопросов, на которые надо ответить. Как роботу двигаться среди животных? Как взять поросенка и положить его в тележку? Можно ли ухватить его за ногу, за кость, за сустав или обязательно за туловище? В какой части тела? И для каждой операции надо ответить на сотни подобных вопросов.
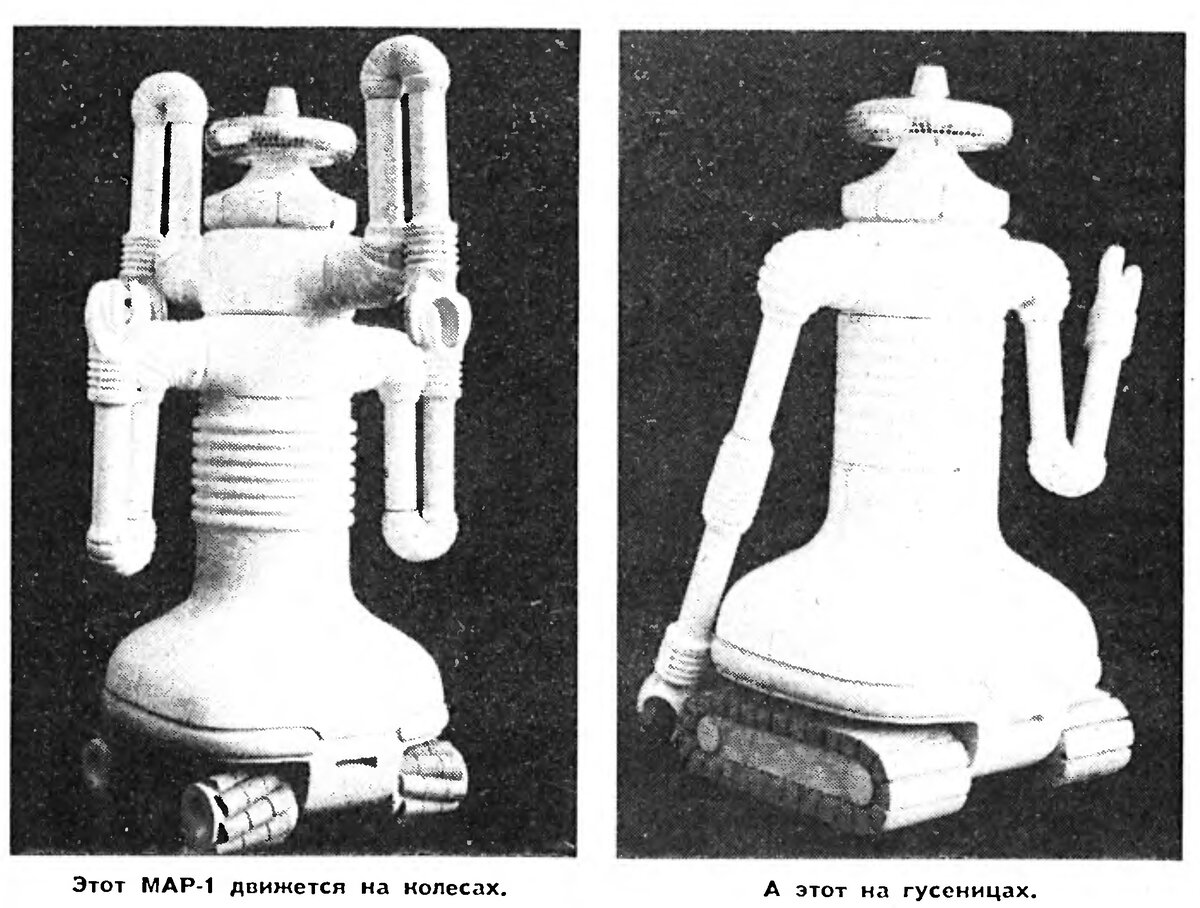
Результатом стала модель мобильного автономного робота (МАР-1). У него было две руки с восемью степенями свободы и гидроприводами, которые могли поднимать до 75 кг груза каждая. Корпус мог свободно вращаться вокруг вертикальной оси. Тактильно робот мог определять температуру в диапазоне от 0,4 до 180 градусов, влажность от 3 до 99%, регулировать силу сжатия от 0,0294 до 112,7 килограмм.
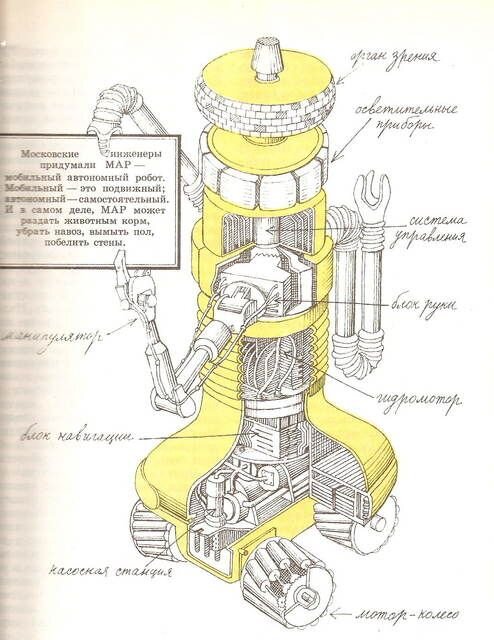
Программировался он кассетами с магнитной записью. Габаритами он был примерно с человека: высота - 185 см, площадь основания - треть квадратного метра. Сделано это было потому что все помещения и проходы приспособлены для работы человека.
Были созданы и другие модели:
Робот с телескопическими руками для работы в теплицах.
Самоходная рама длиной около 10 метров со множеством рук для работы в открытых полях.
Многорукий робот по сбору плодов и обрезке сучьев в больших садах.
МАР-1 прошёл серию испытаний и на этом его история закончилась, так как, даже сейчас, в условиях быстрой памяти и мощных микропроцессоров, создать робота, полностью заменяющего человека на ферме, не удается.