Приветствую на канале! Сегодня я расскажу как устроен мой самодельный блок питания с регуляторами на двигателях от CD-ROM-ов, в составе с модулем на микросхеме XL4016E1. Модуль XL4016 это популярный импульсный DC-DC преобразователь, с регулировкой тока и напряжения. Изначально этот модуль имеет аналоговую регулировку, то есть напряжение и ток регулируются подстроечными резисторами. Моя задача была, "прикрутить" к нему цифровую регулировку, да ещё на BLDC моторах.
А вот так выглядит блок питания.

Изначально блок был двухканальным, а регулировка осуществлялась на многооборотных переменных резисторах.
Но почему я решил пойти таким сложным путём? Дело в том, что обычные переменные резисторы подвержены износу, с чем мне постоянно приходилось и приходится сталкиваться. В один прекрасный момент мне это надоело и решил я всё усложнить, тем самым повысить надёжность в разы. Китайские многооборотные резисторы прослужили мне примерно полгода с момента создания этого блока. Очень не рекомендую их использовать! Да, собственно любые другие переменные резисторы тоже подвержены износу, механических энкодеров это тоже касается. Вот по этой причине было твердо решено использовать двигатели от сидиромов. В них изнашиваться нечему. Я уже на канале выкладывал статью, о том как заставить работать BLDC двигатель от CD-ROM-а в роли энкодера. Кто не видел, обязательно почитайте, потому что темы связаны. Изначально кстати, регулировка была придумана на кнопках, статья про кнопочный регулятор тоже есть на канале. В каком то смысле кнопочный регулятор и был основой создания данной регулировки.
Итак, сигналы с мотор-энкодеров обрабатывают контроллеры ATtiny13 один контроллер для напряжения, второй для тока. В целом они полностью идентичны. Ниже представлена схема для одного регулятора.
С выхода контроллера (ножка 5) снимаются прямоугольные импульсы с частотой 38 кгц. и скважностью от 0 до 100 процентов. Другими словами, на выходе ШИМ сигнал, длительность импульсов которого задаётся энкодерами. Далее импульсы сглаживаются RC цепочкой R1C2, тем самым преобразуются в напряжение. Уровень напряжения зависит от длительности импульсов, то есть от скважности, и изменяется в диапазоне от 0 до 5-ти вольт. Так как контроллер 8-ми битный на выходе мы можем получить 256 значений ШИМ. То есть, максимальное опорное напряжение - 5 вольт делится на 256. Каждый шаг равен 0,019 вольт.
Далее я решил установить ещё LC-фильтр L1C3, то есть сделать дополнительную фильтрацию напряжения от пульсаций ШИМ.
Теперь у нас есть регулируемое опорное напряжение, стабильность которого в первую очередь зависит от стабильности напряжения питания контроллера. Сам шим сигнал очень стабильный, и ни разу не было замечено плавающего напряжения на выходе.
Далее опорное напряжение подаётся на первый канал операционного усилителя LM358 и сравнивается с выходным напряжением блока питания. Выход же операционного усилителя LM358, через диод подключен к ноге 2 микросхемы XL4016.
Подстроечным резистором PR1 настраивается максимальное выходное напряжение блока питания.
С регулировкой тока всё тоже самое, единственное, напряжение на усилитель ошибки идет от токового шунта, который установлен на модуле XL4016. Стрелочкой указана точка съёма сигнала для усилителя ошибки.
Выход второго канала ОУ LM358, тоже через диод подключен ко второй ноге микросхемы XL4016. Диоды в данном случае разделяют каналы ОУ. Так как в LM358 на выходе два плеча, без этих диодов произошло бы замыкание.
Подобным образом организовано в микросхеме TL494.
Как можно видеть из схемы выше, оба регулятора идентичны, разница лишь в цепях обратных связей R9 R2 R11 C3. И номиналах резисторов задающих опорные напряжения R4 R5. Так как напряжение образующееся от появления тока очень мало, опорное напряжение нужно очень низкое поэтому резистор R4 на 300 ком.
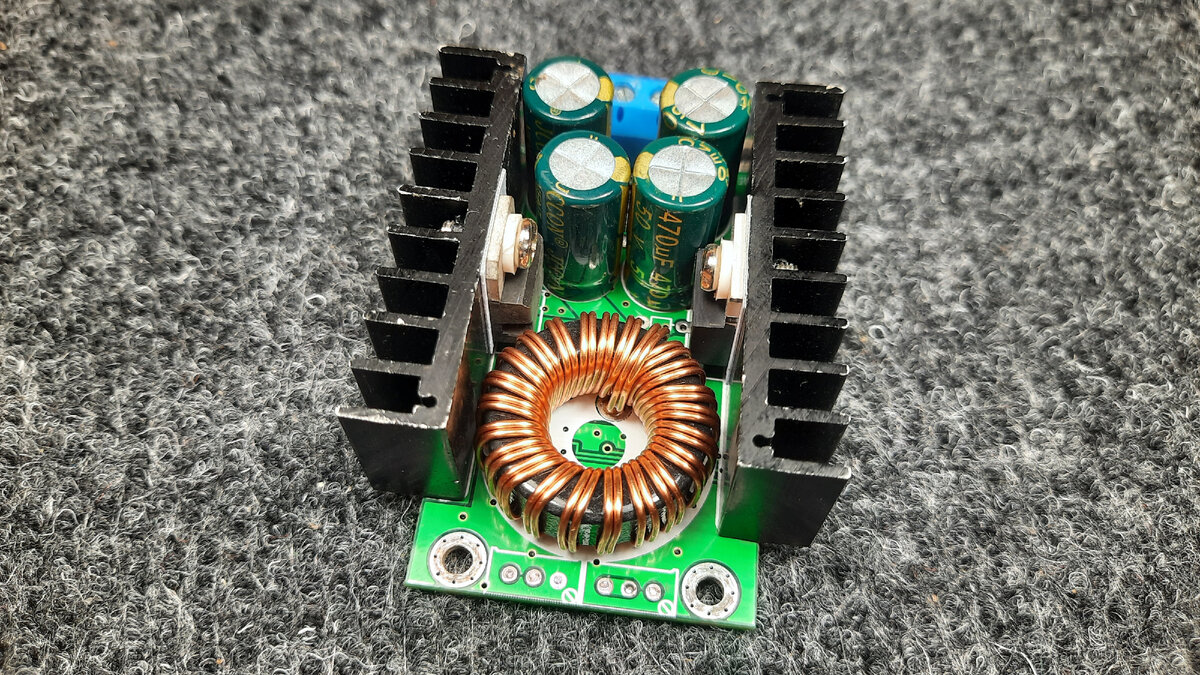
На модуле, нужно отпаять многооборотные резисторы и диод. Резисторы нам понадобятся для регулятора, а диод изначально связывает родной регулятор тока с XL4016. Теперь будем использовать свой регулятор. Вторая нога является входом обратной связи (FB), то есть входом усилителя ошибки. Мы же условно организовали внешний усилитель ошибки, для возможности сравнения с опорным напряжением. Вот и вся хитрость.
Красными стрелочками указано что удалить (на данной плате уже выпаяно), а синяя стрелочка показывает место куда можно припаять сигнал к второй ноге XL4016. Родная микросхема LM358 тоже пригодилась для самодельного регулятора.
Такая плата у меня получилась. На самом деле она "сырая" и требует много корректировок. По итогу я решил переделать блок и сделать каждый модуль на отдельной плате, но об этом возможно как нибудь в следующий раз.
Синими подстроечными резисторами задаётся максимальное выходное напряжение, а также ток. Микросхема по центру LM324 формирует сигналы с двух моторов для контроллеров ATtiny13. Питается плата от отдельного источника питания напряжением 5 вольт. В моем случае это зарядное устройство от телефона Samsung.
Вольтамперметры использовал на 4 разряда, что немного информативнее, чем трёхразрядные.
По точности они работают вполне удовлетворительно.
По итогу хочу сказать, что регулировка получается отличной, полностью отсутствуют ложные сигналы с моторов. Наверное замечали с механическими энкодерами, что при вращении например в плюс регулировка может сработать в противоположную сторону. Это чаще касается изношенных энкодеров. Данное явление можно заметить на колесе прокрутки у компьютерной мыши. С мотор-энкодерами это исключено.
К сожалению в прошивке на контроллеры ATtiny13 нет памяти на последнее установленное значение, то есть при выключении питания ШИМ сбрасывается в 0. Это можно поправить, немного дополнив прошивку.
Ещё можете посмотреть видео, где я показываю как можно "прикрутить" этот регулятор, но только на кнопках, к компьютерному блоку питания.
Думаю данную схему можно применить не только для блоков питания. Можно организовать различные регулировки, например громкости или яркости ламп, да и много чего ещё.
К сожалению пока не могу найти прошивку для контроллеров. Но постараюсь в ближайшее время выложить. Если что, напоминайте мне в комментариях.
На этом думаю всё, подписывайтесь на канал, ставьте лайки, пишите в комментариях, что вы думаете о данном решении создания блоков питания. А в одной из следующих статей, я расскажу ещё одну интересную идею про этот регулятор. Всем пока!
Ах да, вот ещё парочка сопутствующих видеороликов.