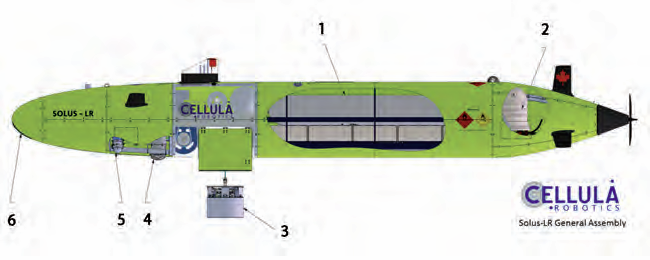
В рамках программы оборонных исследований Министерства обороны Канады DRDC (Defence Research and Development Canada) фирмой Cellula Robotics Ltd., Burnaby, провинция Британская Колумбия, для ВМС создан крупногабаритный автономный необитаемый автономный аппарат (НПА) XLUUV (Extra-Large Unmanned Underwater Vehicle) «Solus-LR», в котором используется запатентованное якорное устройство с якорем-присоской, выпускаемым на тросе из специальной выгородки типа «бомбовый отсек» (“bomb-bay”) через люк в днище НПА.
После постановки на якорь НПА может длительное время (до нескольких месяцев) находиться в подводном малошумном режиме с электропитанием от аккумуляторных батарей.
Постановка на якорь возможна в условиях подводного течения со скоростью до 2,0 м/сек. НПА имеет модульную конструкцию и изменяемую в широких пределах номенклатуру полезной нагрузки, при этом компенсация массы полезной нагрузки осуществляется с помощью системы управления плавучестью НПА.
НПА может скрытно осуществлять сбор информации относительно подводных, надводных и воздушных целей, направляющихся к берегам Канады, в том числе в арктических широтах. Имеется возможность инспекции подводных магистралей– трубопроводов и кабелей – с помощью гидроакустических средств (работы могут быть выполнены гораздо быстрее, чем при использовании дистанционно управляемых НПА ROV).
НПА XLUUV может спускаться на воду и подниматься с помощью аппарели катера или док-камеры судна.
Характеристики НПА «Solus-LR»: габариты – ∅1,0×8,7 м; масса – 3 700 кг; пределы изменения водоизмещения – ±50 кг; скорость хода – от 0,7 до 2,0 м/сек.; оперативная глубина погружения – до 3 000 м; дальность подводного хода – 2 000 км (при необходимости может быть увеличена до 4 000 км).
Состав энергоустановки: водородно-кислородный топливный элемент с запасом энергии 250 кВт/час.; система хранения газообразных водорода и кислорода в баллонах высокого давления; резервная/аварийная литий-ионная аккумуляторная батарея; автономная система управления энергетической установкой, использующая операционную систему ROS (Robot Operating System).
НПА управляется двумя носовыми горизонтальными и тремя кормовыми рулями (вертикальным и двумя горизонтальными, разнесёнными на 120° по отношению к диаметральной плоскости).
Штатно на НПА «Solus-LR» установлены гидроакустические системы:
– с синтезированной апертурой;
– трёхмерная бокового обзора фирмы Ping DSP, Inc. (North Saanich, Канада);
– многолучевая «Delta T» фирмы Imagenex Technology Corp. (Port Coquitlam, Канада);
– буксируемая.
Кроме того, имеются:
– запатентованный трёхосевой самокомпенсирующийся магнитометр SCM (Self Compensating Magnetometer фирмы OFG (Ocean Floor Geophysics, Burnaby, Канада) с предусмотренной возможностью измерения и автоматической компенсации параметров магнитного поля самого НПА;
– запатентованный датчик внешнего электрического поля CAE фирмы OFG;
– датчики параметров окружающей среды и химические датчики.
На НПА применена высокоточная система навигации «SPRINT-Nav 300» фирмы Sonardyne International Ltd. (Yateley, Великобритания), включающая инерциальную навигационную систему и доплеровский лаг. Навигационная ошибка – менее 1,0 морской мили на 12 часов хода с использованием инерциальной навигационной системы, менее 2,0 м на каждые 10 км хода с использованием лага.
Для связи в подводном положении используется оптический модем «BlueComm 200» фирмы Sonardyne, в надводном – GPS, система спутниковой связи «Iridium», беспроводная локальная сеть Wi-Fi.
Системы обеспечения безопасности НПА «Solus-LR» – обнаружения неисправностей; обнаружения протечек забортной воды; направленная вперёд ГАС предотвращения столкновений; системы WatchDog timers, предназначенные для своевременного перезапуска «зависшего» оборудования с целью восстановления его работоспособности; выпускаемый носовой буй и носовой рым для извлечения из воды.
Испытания якорного устройства с якорем-присоской и системой управления плавучестью были начаты в августе 2019 г. и проходили в бассейне.
Первый этап морских испытаний НПА «Solus-LR» в надводном и подводном положениях проходил с октября по декабрь 2019 г. в заливе Burrard Inlet в акватории порта Port Moody (Канада) в сопровождении исследовательского судна «Cellula Ranger».
Второй этап морских испытаний закончился в марте 2020 г. Он выполнялся во фьорде Indian Arm fjord, недалеко от Vancouver. НПА прошёл в подводном положении без поддержки с берега расстояние 10 км в течение одного месяца.
В ходе морских испытаний использовались акустические транспондеры «Compatt 6» и «MicroRanger 2» фирмы Sonardyne, а также оптический модем «BlueComm 200».
Третий (заключительный) этап морских испытаний проведен летом 2020 г.

#необитаемый
#беспроводные технологии
#автономность
#испытания
#исследовательское судно
#патент
#Арктика
#аккумуляторная батарея
#скрытность
#топливный элемент