Другие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Барометр и GPS, Сборка на раме Q250, Замена рамы, OSD-меню и тест времени, PID, Проблемы при запуске, Калибровки и режимы, Настройка моторов, Проблемы размещения, Порт приёмника, ELRS, Прошивка контроллера, Запчасти
После установки магнитометра требуется его настроить.
Во-первых, нужно его откалибровать. Калибровка не связана с ориентацией магнитометра и её можно делать сразу.
Калибровка магнитометра в INAV
Это делается во вкладке Setup, где нужно нажать кнопку Calibrate Compass.
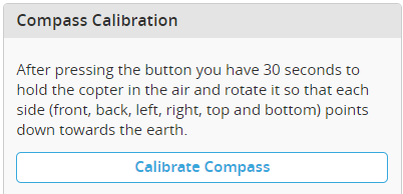
После нажатия у вас будет 30 секунд, чтобы покрутить коптер во всех плоскостях.
Результаты нужно сохранить, но правильно работать магнитометр будет только после установки правильной ориентации.
Калибровка получает показания магнитометра в текущем магнитном поле. Поэтому старайтесь проводить её подальше от металлических предметов и источников электромагнитных полей.
Батарея и прочие компоненты коптера также влияют на калибровку, поэтому проводите её на полностью снаряжённом и включённом коптере.
Ориентация магнитометра
У магнитометра есть своя ось, относительно которой считаются направления "вперёд" и "вверх".
Плату магнитометра на коптер вы можете установить под разными углами, и значит его ось может смотреть в разных направлениях.
Если ось магнитометра направлена не в ту же сторону, что и коптер, то нужно либо правильно повернуть весь модуль магнитометра, либо задать в настройках поправочный угол между его осью и осью коптера.
В интерфейсе конфигуратора INAV можно выбрать следующие углы: 0, 90, 180 и 270 градусов, а также те же самые углы, но вниз головой (flip):
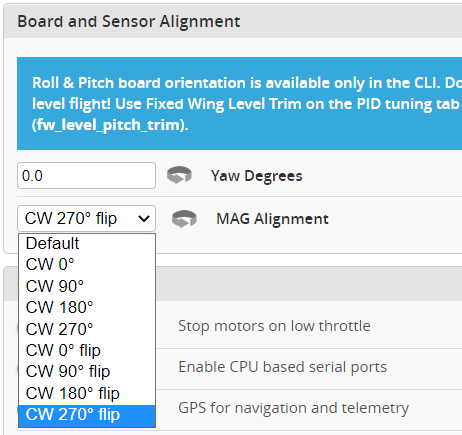
Бывает, что в описании к модулю указывается, под каким углом он стоит. Но бывает, что описание врёт, или вы ставите его физически не под тем углом. Чтобы не путаться, я просто не читаю никакую документацию и пробую все варианты по порядку, пока не найду правильный.
Как определить правильный угол в INAV
Во вкладке Setup модель коптера должна вести себя адекватно, то есть повторять те наклоны и повороты, которые вы делаете коптером.
При этом, когда коптер смотрит на север, магнитометр должен показывать 0 градусов.
Если выбран неправильный угол, то модель будет совершать неправильные наклоны и самопроизвольно разворачиваться в разные стороны.
Нестандартный угол
В интерфейсе можно выбрать только угол, кратный 90 градусам, а мой магнитометр повёрнут под нестандартным углом, поэтому я буду использовать CLI-команды, чтобы его задать. Но сперва я должен узнать, чему равен этот угол. В этом мне поможет графический редактор Xara X.
Я измерил расстояния между отверстиями в GPS-модуле и получил некий прямоугольник (30.5 * 20 мм). Его я нарисую в редакторе, сохраняя те же пропорции.
Затем я поверну его так, чтобы два его угла попали на вертикальную линию (так он установлен в коптере):
И редактор просто сообщит мне, на какой угол повёрнут прямоугольник: 33.1 градуса. Это значение я буду добавлять к стандартным 0, 90, 180 и 270 градусов. (На самом деле пришлось отнимать.)
Теперь я могу пройти во вкладку CLI (Command Line Interface):
И там задать нужный угол с помощью команд:
set align_mag_pitch = 1800
set align_mag_roll = 0
set align_mag_yaw = 2369
save
Получилось не с первой попытки, это те значения, которые уже финальные. Значение align_mag_pitch = 1800 говорит о том, что компас перевёрнут вверх ногами, а align_mag_yaw = 2369 это 270 - 33.1. То есть это стандартный пресет CW 270 flip с моей поправкой.
Полевая калибровка
При выезде в поле, если вы заметили некорректную работу магнитометра, или же просто для профилактики, рекомендуется провести повторную калибровку.
Это можно сделать через стик-меню, нажав на аппаратуре левый стик вправо-вверх, а правый вниз.
Коптер на 30 секунд перейдёт в режим калибровки, и вам нужно будет точно так же крутить его во всех плоскостях.
Если коптер снабжён пищалкой, то специальный звуковой сигнал сообщит о начале и окончании калибровки, а также о её успешности.
Осталось настроить полётные режимы, возврат домой и режим FailSafe.
Читайте дальше: