Как мы знаем, датчик (преобразователь) давления – это устройство, преобразующее одну физическую величину «давление» в другую физическую величину «сила тока».
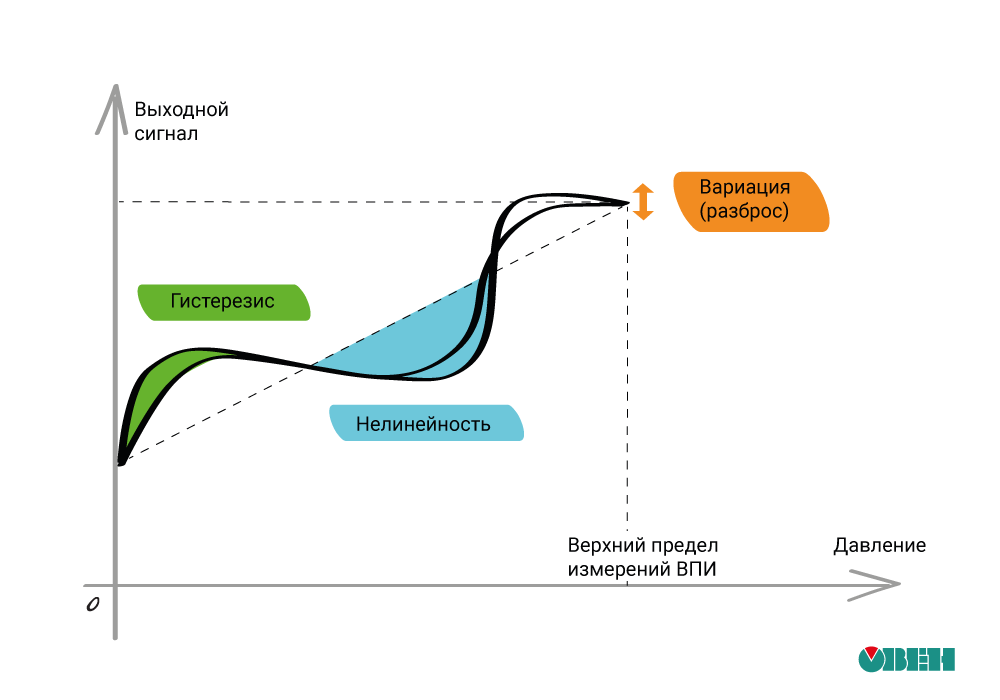
Из-за того, что сенсор давления — это физический объект, его выходной сигнал имеет весьма существенные отклонения, изгибы, и нелинейности, которые необходимо уменьшить до значений меньше заявляемой погрешности.
Теоретически это можно исправить микросхемотехникой, размещённой сразу на сенсоре, но это в разы удорожает сенсор, производители сенсоров часто не имеют достаточной компетенции, потребителей сенсоров не удовлетворяют параметры нормирования.
Поэтому исторически сложилась так, что задачу исправления врождённых отклонений до требуемой погрешности в датчике решает нормирующий преобразователь — устройство:
• запитывающее сенсор опорным напряжением
• выравнивающее и линеаризующее сигнал от сенсора
• стабилизирующее показания по температуре
• формирующее выходной сигнал в мА, В, RS-485
Каким же образом нормирующий преобразователь выравнивает и линеаризует сигнал от сенсора? В его составе находится микроконтроллер, который в процессе калибровки запоминает отклонения «своего» сенсора, вычисляет и хранит коэффициенты полинома третьей степени, выравнивающего показания сенсора, а также вычисляет и хранит коэффициенты полинома второй степени, компенсирующего температурную погрешность сенсора. Попробуем «в крупных деталях» разобраться как микроконтроллер это делает.
Стенд калибровки представляет из себя совокупность следующих компонентов:
1. компьютер с установленной программой вычисления коэффициентов полиномов
2. калибратор давления, по сути, сверхвысокоточный и сверхстабильный клапан
3. датчик (преобразователь) с конкретными сенсором и микроконтроллером в составе нормировщика
4. пневмосистема с источником опорного давления
Фаза калибровки 1
Компьютер согласно программе подаёт на калибратор сигнал, на основании которого калибратор сверхточно и сверхстабильно проключает на датчик последовательно серию величин давления (точек калибровки) от «нуля» до «диапазона измерения» датчика и обратно, выдерживая каждую точку на определённое время.
Компьютер собирает ненормированные показания от сенсора и определяет его нелинейность, гистерезис и разброс. Обозначим выходной сигнал от сенсора «X».
Фаза калибровки 2
Компьютер согласно программе рассчитывает и заносит в микроконтроллер датчика коэффициенты полинома второй степени а, в, с, построение которого от сигнала сенсора X выпрямляет выходной сигнал Y по формуле Y = аX²+вX+с до значений, не выходящих за пределы основной погрешности калибруемого датчика.
Фаза калибровки 3
Основная погрешность определяется и калибруется при нормальных условиях: температуре среды +23°С, атмосферном давлении 760 мм.рт.ст, влажности среды 60%.
При изменении условий эксплуатации датчика обязательно появляются дополнительные погрешности: в основном температурные.
Для их компенсации проводится дополнительный цикл калибровки при +80°С.
Датчик помещают в промышленную печь, нагревают до +80°С, компьютер подаёт через калибратор точки калибровки на датчик и фиксирует смещение выходного сигнала датчика Y из-за возникшей температурной погрешности.
Фаза калибровки 4
Компьютер согласно программе рассчитывает и заносит в микроконтроллер датчика коэффициенты дополнительного полинома второй степени d, e, построение которого от сигнала сенсора X выпрямляет выходной сигнал величиной ΔY в зависимости от температуры датчика по формуле ΔY = dX+e до значений, не выходящих за пределы основной погрешности калибруемого датчика при температуре +80°С.
Теоретически, микроконтроллер в составе ОВЕН ПД100 позволяет проводить до трёх дополнительных циклов термокомпенсирования. А в новом конвейере ПД100И в 2022 году планируется внедрить циклы калибровки на -20°С и -40°С.
В результате проводимой в данный момент на заводе калибровки датчиков (преобразователей) давления ОВЕН ПД100(И) в микроконтроллере каждого датчика хранится набор уникальных коэффициентов нормирования, позволяющий компенсировать погрешности установленного в этом датчике сенсора до пределов «не более чем» заявленной для этого датчика погрешности с запасом 20%. То есть каждый ПД100-…-1,0 производится «не хуже чем» 0,8%, а ПД100И-…-0,25 «не хуже чем» 0,2%.