Проблема передвижения роботов по пересеченной местности до сих пор остается нерешенной. Роботизированные машины могут быть остановлены глубокими пропастями или слишком крутыми препятствиями. Понимая это, доцент Университета Нотр-Дам Ясемин Озкан-Айдин изобрела партию четырехногих роботов, напечатанных на 3D принтере, которые могут работать вместе, чтобы обойти такие препятствия. Рассказывает Илья Шарков, педагог дополнительного образования мобильного технопарка «Кванториум».
— Когда муравей встречает широкую яму, которую не может преодолеть в одиночку, он зовёт других муравьёв, чтобы они образовали живой мост из своих тел. Подобное поведение реализовано в небольшом четвероногом роботе, который может стать источником вдохновения для более совершенных поисково-спасательных устройств.
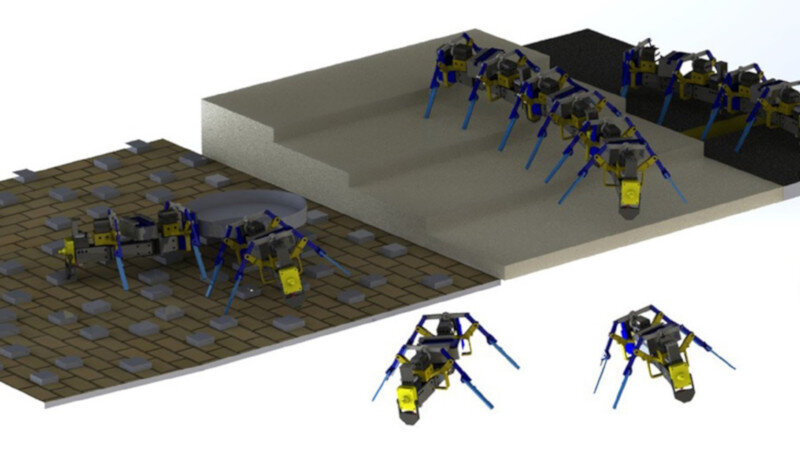
Каждый робот длиной от 15 до 20 см совмещает в себе литий-полимерный аккумулятор, микропроцессор, датчик света, а также магнитные датчики касания на передней и задней части корпуса. Когда он застревает, то посылает сигнал по беспроводной связи другим роботам, находящимся рядом. Вновь прибывшие роботы используют свои магнитные датчики касания, чтобы определить положение относительно друг друга и соединить свои тела в цепочку. Таким образом, они образуют мост для преодоления пропастей.
По словам разработчиков, роботы могут применяться при поиске выживших в местах катастроф, а также могут работать вместе для переноски предметов, слишком больших и тяжелых для отдельно взятого робота.
На данный момент исследователи работают над улучшением чувствительности, возможностей совместной работы и увеличением заряда батареи своей роевой робототехнической системы. Наряду с использованием в поисково-спасательных операциях, в конечном итоге она может найти применение в таких областях, как освоение космоса, мониторинг окружающей среды или изучение коллективной динамики насекомых, таких, как: муравьи и термиты.