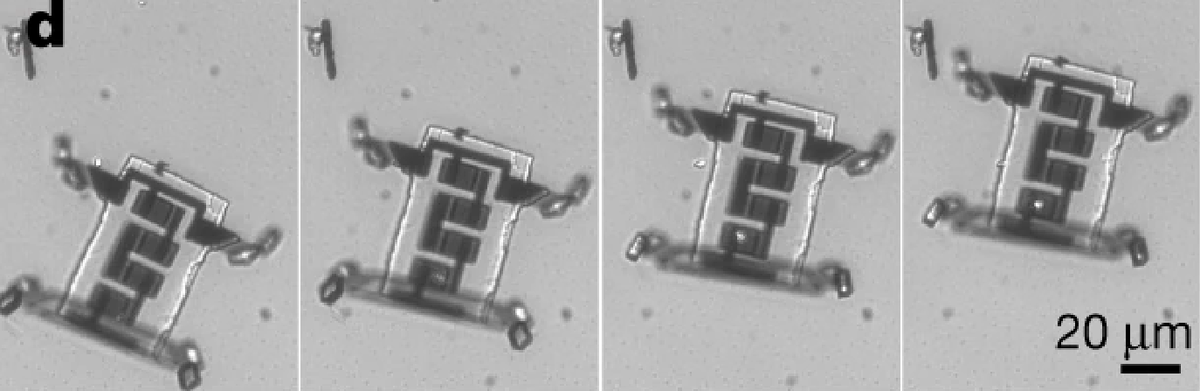
Через кремниевые фотоэлектрические элементы (типа маленьких солнечных батарей) этот робот получает энергию от лазера. В результате возникают слабые электрические импульсы, которых достаточно, чтобы "ножки" робота сгибались и разгибались. Возможно это благодаря приводам "конечностей" робота, которые работают от токов очень низкой мощности – такие же бегают по электросхемам и датчикам. Благодаря этому, хоть в эксперименте робот работает на лазере, его можно легко объединить с подходящими электронными "мозгами" и аккумулятором.
Этот робот не самый маленький из созданных человечеством, но для своих размеров самый сильный и наиболее готовый к интеграции с уже проверенными электронными микросхемами. Дело в том, что приводы роботов делаются по тем же технологиям, что и печатные платы, поэтому можно производить их вместе, а не собирать для каждого робота отдельно.
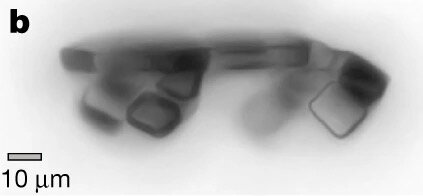
Толщина робота 5 мкм (это в 200 раз меньше мм), ширина 40 мкм (в 25 раз меньше мм) и в длину от 40 до 70 мкм (в зависимости от количества электроники). Создание одного робота будет обходиться сильно дешевле 1 цента. Такие роботы устойчивы к изменениям температуры на 200 градусов и кислотности на 13 порядков. Они так малы и прочны, что легко проходят через иглы самых маленьких диаметров (то есть можно вкалывать их). И, соединив роботов с необходимыми датчиками и логическими схемами, можно приспособить их для выполнения разных задач. Например, для борьбы с раковыми клетками или с вредителями сельхоз-растений.
Источник
Miskin, Marc Z., et al. "Electronically integrated, mass-manufactured, microscopic robots." Nature 584.7822 (2020): 557-561