Окончание... часть 1, часть 2.
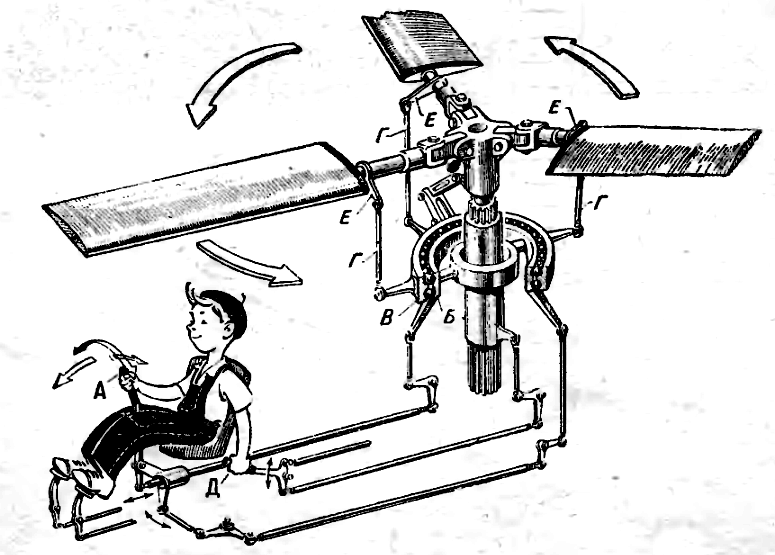
А как быть в том случае, если потребуется увеличить общую подъемную силу ротора (например, обеспечить вертикальный подъем вертолета), одновременно на всех лопастях увеличить углы атаки? Для этого оба кольца автомата-перекоса Б и В следует поднять кверху, не меняя угла их наклона. Чтобы перевести вертолет на снижение, надо одновременно на всех лопастях уменьшить углы атаки. Для этого кольца Б и В должны быть опущены. Такое одновременное изменение углов атаки всех лопастей называется «управлением общим шагом ротора». Делается это при помощи специального рычага Д, расположенного обычно слева от сиденья летчика (рис. 2). Этим то рычагом и производится перемещение кверху или кинзу кольца Б, а значит, одновременное изменение углов атаки у всех лопастей.
У моей модели система управления похожа на ту, какая используется и на настоящем вертолете. На ней применен такой же автомат-перекос. Каждая лопасть при вращении ротора может менять свой угол атаки от -1° до +15°, поворачиваясь вокруг оси, размещенной на 27% ширины.
Управление рычагами, идущими к автомату-перекосу, осуществляется тремя исполнительными механизмами от модельной системы радиоуправления «РУМ-1», только передача на поводок лопастей замедлена в три раза постановкой дополнительно двух шестерен (от часового механизма). Сделано это для того, чтобы можно было преодолевать усилия, действующие от лопастей на автомат-перекос. Как видно на вкладке, система рычагов управления устроена так, что выполнение одной команды не может отразиться на качестве выполнения какой-либо другой команды. В ось ротора 12 включен демпфер 13 и 14, воспринимающий крутильные колебания вала. В качестве бака для горючего используется круглая резиновая грелка 23. От бака вдоль штанги проложены хлорвиниловые трубки, по которым топливо подается к двигателям. Предварительно оно проходит редуктор с весовым компенсатором, который регулирует подачу топлива. Это необходимо, так как на больших оборотах ротора топливо подвергается действию центробежной силы. Работу всей винтомоторной установки я регулировал да полетов модели на специальном стенде. Рекомендую это проделывать всем, кто будет строить такие модели вертолетов.
Фюзеляж моей модели 15 имеет овальное сечение. Он представляет собой скорлупу 16, выклеенную из папье-маше и надетую на силовую раму. К этой раме крепятся пилон, через который проходит ось ротора, стойки шасси 17 и 18, исполнительные механизмы управления и хвостовая балка, несущая оперение.
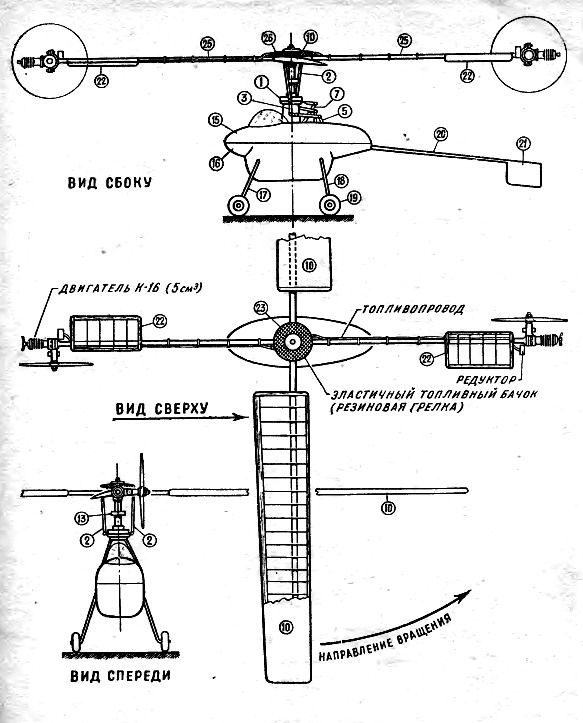
На конце хвостовой балки 20 укреплено оперение, состоящее из косо расположенного киля. В случае необходимости перед этим килем можно поставить дополнительно небольшой горизонтальный стабилизатор. В фюзеляже размещены аппаратура радиоуправления 24 и батареи электропитания.
Регулировку модели надо производить на привязи. Перед регулировочными полетами необходимо добиться правильного расположения центра тяжести всей модели. Центр тяжести должен находиться на 15г 20 мм впереди оси ротора. Снизу фюзеляжа, в месте расположения центра тяжести, надо укрепить кольцо. К этому кольцу привязывается бечевка, на которой и запускается модель в регулировочные полеты.
Первые регулировочные полеты очень хорошо производить со стола.
Бечевку при этом удобно пропустить через середину стола, давая ей слабину постепенно, начиная с 20 мм. Во время таких «привязных» полетов надо тщательно проверять работу всех команд управления и стараться устранить разворот модели, возникающий обычно из-за действия потока воздуха от ротора на оперение.
Описываемая здесь модель неоднократно совершала хорошие управляемые полеты. Я уверен, что мы, советские авиамоделисты, на деле докажем, что класс радиоуправляемых моделей вертолетов имеет все права на свое развитие.