Продолжение... Начало.
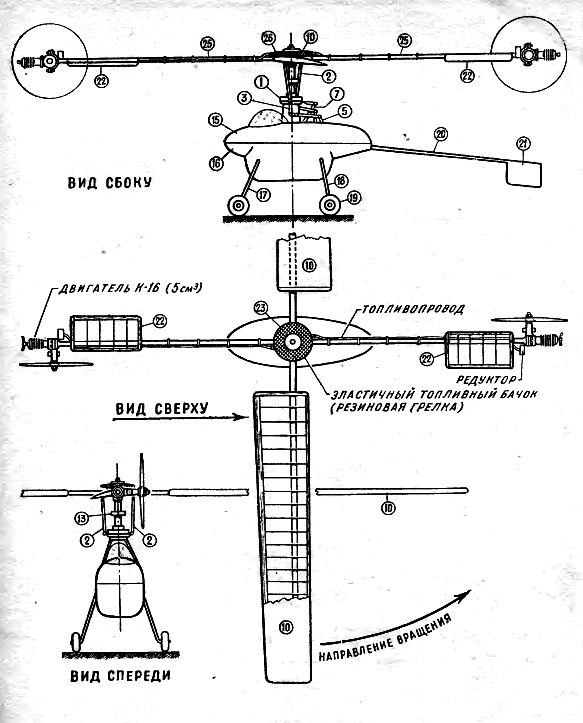
Однако у моей радиоуправляемой модели есть некоторые особенности в конструкции. Так, на штанге 25 около каждого двигателя размещены небольшие стабилизирующие крылышки 22. Штанга и лопасти ротора расположены на качающейся ступице с карданным подвесом. Радиоуправление моделью осуществляется примерно через такой же механизм, как и в настоящих вертолетах. Летчик управляет настоящим вертолетом при помощи устройства, называемого автоматом-перекосом. Автомат-перекос был предложен еще в 1911 году одним из русских

инженеров, а впоследствии академиком Б. Н. Юрьевым. Это остроумное устройство позволяет менять по желанию летчика угол установки лопасти при вращающемся роторе. На рисунке 2 показано, как устроен автомат перекос на современном вертолете с трехлопастным ротором. Отклоняя ручку управления А вперед, летчик заставляет наклониться вперед
внутреннее кольцо автомата-перекоса, обозначенное на рисунке буквой Б. Это кольцо не вращается, но оно соединено с внешним кольцом В через шарики, уменьшающие трение между кольцами. Это внешнее кольцо В соединено с ротором вертолета и вращается вместе с ним. Однако плоскость вращения кольца В имеет возможность несколько менять свое положение относительно плоскости вращения ротора. Так как кольца Б и В соединены между собой, то при изменении плоскости вращения кольца Б одновременно меняется и плоскость вращения кольца В.
К кольцу В шарнирно укреплены стойки Г, которые так же шарнирно соединены с поводками Е лопастей вертолета.
Что же произойдет в таком механизме, если летчик, как мы отметили вначале, переместит ручку А вперед и тем самым наклонит вниз передний край кольца Б? Одновременно с этим и кольцо В примет такое же положение. Это приведет к тому, что при вращении ротора в том месте, где кольцо Б приближается к плоскости вращения ротора, каждая стойка Г будет перемещаться кверху, что и увеличит угол атаки лопасти. В том же месте. где кольцо Б удаляется от плоскости вращения ротора, стойки Г перемещаются книзу, и при этом угол атаки каждой лопасти уменьшится. Таким образом, получается, что если летчик отклоняет ручку управления А вперед, то при каждом обороте ротора в передней части его диска углы атаки всех лопастей будут уменьшаться, а в задней части диска увеличиваться. Благодаря такому циклическому (то есть повторяющемуся в течение каждого оборота) изменению угла атаки лопастей подъемная сила передней части диска ротора уменьшается, а задней его части увеличивается. В результате общая подъемная сила ротора будет направлена несколько вперед и сообщит вертолету поступательное движение. Точно так же при отклонении ручки управления назад или вбок будут происходить соответствующие изменения углов атаки лопастей по мере вращения ротора. Благодаря этому вертолет начнет перемещаться назад или вбок.
Продолжение следует....