Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.
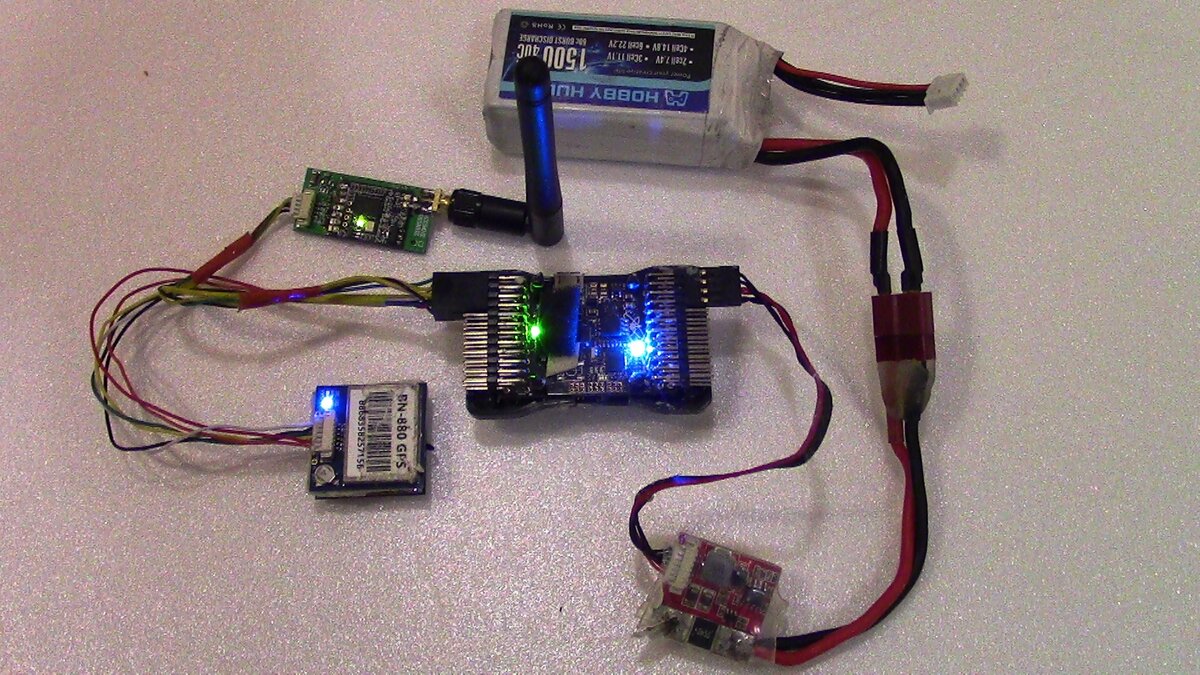
После того, как все необходимые для безопасного полета модули (передатчик и приемник, телеметрия, GPS, магнитный компас, питание) приобретены, проверены и настроены, самое время перейти к настройке самого контроллера и последующей установки на борт всего оборудования.
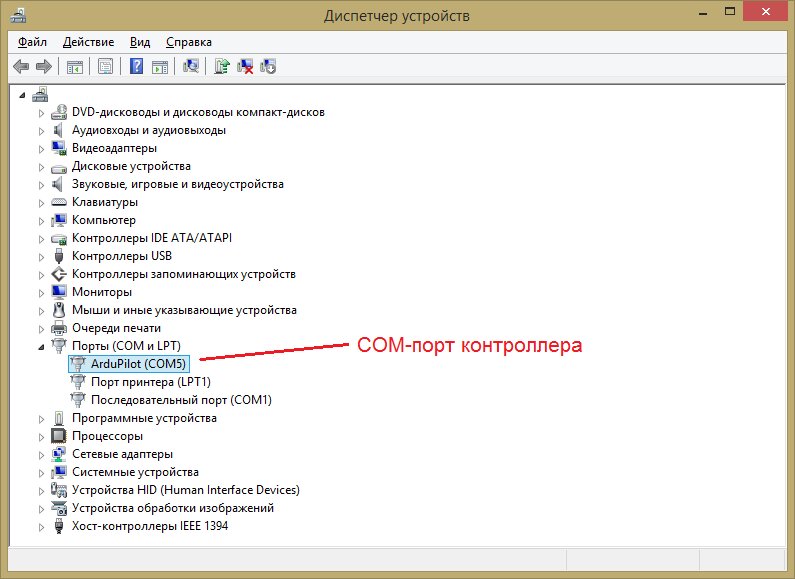
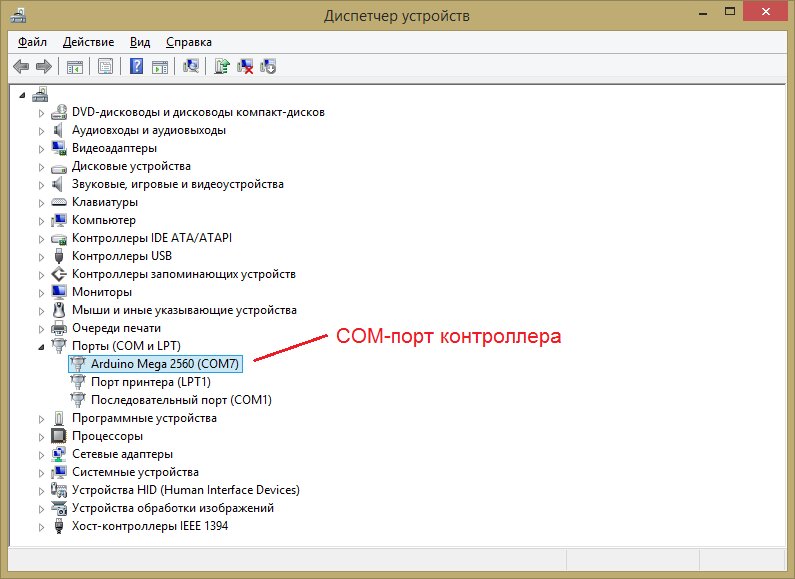
Все настройки осуществляются через программу Mission Planner (МР). В первую очередь необходимо установить на контроллер соответствующую прошивку. Для этого подключаем его к компьютеру через USB кабель и убеждаемся через Диспетчер устройств, что наш контроллер определился как один из COM-портов. В зависимости от конфигурации вашего компьютера и типа контроллера, название и номер COM-порта может отличаться от указанной на картинке. Это не важно. Главное, чтобы он определился, а не был помечен, как неизвестное устройство. Иначе придется искать в Интернете и устанавливать драйвера. Надеюсь, что этого не понадобиться, если Вы установили последнюю версию Mission Planner, поскольку в его дистрибутив входят все необходимые драйвера, которые устанавливаются при инсталляции.
Запускаем МР и в главном верхнем меню выбираем пункт SETUP. Далее в правом верхнем углу, рядом с кнопкой CONNECT, из выпадающего списка выбираем номер COM-порта нашего контроллера и в соседнем окне выбираем скорость соединения 115200 Бит/с. Кнопку CONNECT не нажимаем, поскольку при прошивке соединение устанавливается напрямую.
В левой колонке есть два варианта прошивки Install Firmware и Install Firmware Legacy. Отличаются они тем, что в первом случае МР постарается установить последнюю официальную прошивку (не факт, что она уже проверенная и без критических ошибок), а во втором случае можно будет выбрать предыдущие проверенные версии прошивок. Перед выбором прошивки можно поискать на различных форумах в Интернете отзывы и выбрать правильное решение.
Если мы прошиваем контроллер APM, то верхний вариант Install Firmware нам не подойдет, поскольку последняя версия для самолета на момент написания статьи 4.0.9, а последняя совместимая с APM - 3.4.0. В этом случае MP выдаст ошибку - Failed to discover board id, что означает - не удалось идентифицировать контроллер для данной версии прошивки. Поэтому без вариантов выбираем пункт Install Firmware Legacy. Я всегда пользуюсь этим пунктом при прошивки как APM, так и Pixhawk. Нажимаем мышкой на картинку самолета, под которым указана последняя официальная версия прошивки (МР проверяет информацию каждый раз при выборе данного пункта) и в ответ получаем окно с вопросом подтверждения установки этой версии. Соглашаемся и начинается процесс прошивки. В случае с APM после соглашения с установкой официальной версии прошивки появится следующее окно, в котором говориться, что для данного контроллера из последних версий доступна только прошивка 3.4.0. Не расстраиваемся и соглашаемся на нее, поскольку это вполне рабочая и проверенная версия.
Если нет желания ставить последнюю официальную версию, то в МР предусмотрены различные варианты выбора других прошивок. Можно установить заранее скачанную с сайта или выбрать из выпадающего списка любую из предыдущих версий.
После окончания процесса прошивки нажимаем кнопку CONNECT и проверяем подключение к контроллеру, а так же первоначальные показания акселерометра в главном меню DATA. Если ошибок соединения нет, а акселерометр реагирует на изменения положения контроллера в пространстве (на голосовые предупреждения, что нет GPS, не настроен компас и прочее, пока не обращаем внимание), то переходим к следующему пункту - установки контроллера и всех необходимых модулей на борт самолета, соблюдая все рекомендации по размещению и подключению, озвученные в статьях по каждому модулю.
Сам полетный контроллер необходимо разместить на антивибрационной площадке (продаются готовые), предотвращающей передачу вибрации от корпуса и мотора. Стрелка на корпусе контроллера должна совпадать по направлению с носом самолета. Дальнейшие настройки удобнее осуществлять подключаясь к Mission Planner через модуль телеметрии, поскольку подключить USB кабель к установленному на борт контроллеру и вращать вместе с ним самолет будет не простой задачей. О модуле телеметрии, его подключении и настройке рассказано в статье "Радиоуправляемые самолеты. Телеметрия.", поэтому сразу переходим к дальнейшим настройкам контролера.
Подключаем контроллер к МР через телеметрию и снова заходим в главный экран SETUP. Нажимаем кнопку CONNECT и, после удачного подключения к самолету, в левой колонке появляется меню Mandatory Hardware. Выбираем раздел Accel Calibration (калибровка акселерометра), нажимаем кнопку Calibrate Accel и следуем инструкциям на экране. Программа будет последовательно предлагать разместить самолет в каждой позиции калибровки. Когда самолет находится в нужном положении, жмем любую клавишу и переходим к следующей ориентации. Положения калибровки следующие: горизонтальный уровень, на правой стороне, на левой стороне, носом вниз, носом вверх и на спине. Старайтесь при каждой ориентации (за исключением горизонтальной) выдерживать угол 90 градусов. Важно, чтобы транспортное средство оставалось неподвижным сразу после нажатия клавиши для каждого шага. Это более важно, чем получить правильный угол. За исключением горизонтального уровня, отклонения могут быть в пределах 20 градусов от точности. Положение в горизонтальной плоскости является наиболее важным, так как именно его будет учитывать контроллер во время полета. Если Ваша модель очень большая и ее затруднительно поворачивать в разных плоскостях, то контроллер можно отдельно откалибровать перед установкой. Есть облегченный вариант калибровки только по горизонтальному уровню (кнопка Calibrate Level). Но, если Вы откалибровали в трех плоскостях, то жать на эту кнопку не следует, иначе все ваши предыдущие настройки сотрутся из памяти.
После окончания калибровки акселерометра переходим к следующему пункту в левой колонке Compass -калибровка компаса. Об этой процедуре подробно рассказывается в статье "Радиоуправляемые самолеты. Магнитный компас." Следуем инструкциям и делаем предварительную настройку компаса, дабы убедиться, что все работает. Окончательную калибровку будем делать на месте полетов.
Следующим этапом необходимо провести калибровку нашей аппаратуры радиоуправления, чтобы контроллер знал, в каких пределах у нас приходит сигнал и мог правильно работать. Как настраивать приемник и передатчик подробно рассказано в статье "Радиоуправляемые самолеты. Приемник и передатчик". Теперь остается привязать их к контроллеру. Для этого в левой колонке переходим в раздел RadioCalibration. В правом окне жмём на кнопку «Calibrate Radio» и двигаем стики пульта радиоуправления в минимальное значение, затем в максимальное, потом по кругу, вращаем «крутилки» от упора до упора, щёлкаем всеми тумблерами. Кому как удобно, Нам на данном этапе надо получить правильные значения калибровки своего пульта. Так же смотрим, правильно ли у нас отклоняются элероны рули высоты и поворотов. При необходимости, если отклонения происходят в противоположную сторону, можно указать реверс, добившись правильного управления. Затем выставляем стик газа в ноль, крутилки в ноль, все тумблера от себя (если ни чего не перепаивали) и нажимаем кнопку «Click when Done». Далее появится калибровочная табличка, означающая, что все наши настройки сохранены.
Теперь необходимо провести калибровку регулятора мотора ESC, чтобы он знал минимальные и максимальные значения ШИМ-сигнала, который посылается передатчиком. Есть два варианта калибровки. Через полетный контроллер и в ручном режиме, минуя его.
Вариант первый:
1. Включите пульт радиоуправления и переведите рычажок регулятора газа в максимальное (крайнее верхнее) положение
2. Подключите аккумулятор. На полётном контроллере начнут циклично мигать индикаторы красного, синего и жёлтого цвета, которые сигнализируют о том, что полётный контроллер готов перейти в режим калибровки ESC при следующем включении
3. Отключите и подключите аккумулятор квадрокоптера. Рычажок регулятора газа на пульте радиоуправления должен оставаться в максимальном положении
4. На полётных контроллерах PX4/Pixhawk нажмите и удерживайте кнопку безопасности до тех пор, пока она не начнёт гореть красным цветом.
5. Теперь полётный контроллер находится в режиме калибровки ESC. На полётном контроллере APM индикаторы синего и красного цвета начнут попеременно мигать (как на полицейской машине)
6. Дождитесь, когда ESC издаст звуковой сигнал - количество пиков указывает на тип аккумулятора (3 пика - для 3S аккумулятора и т.д), затем два дополнительных пика известят о том, что максимальный уровень ШИМ сигнала получен и сохранен
7. ESC издаст длинный звуковой сигнал, извещающий об успешном получении и сохранении минимального значения ШИМ для газа, и о том, что калибровка завершена
8. Если вы услышали длинный звуковой сигнал, то калибровка была успешно завершена и мотор активирован - если вы начнёте двигать регулятор газа на пульте вверх, то мотор начнет вращаться.
9. Установите регулятор газа на пульте в нижнее положение и отключите аккумулятор, чтобы выйти из режима калибровки ESC.
Если что-то не получается, то можно использовать второй вариант:
- Подключите трёхпроводной кабель от ESC к каналу газа на радиоприёмнике сигналов с пульта ДУ минуя контроллер
- Включите пульт радиоуправления и переведите рычажок регулятора газа в максимальное (крайнее верхнее) положение
- Подключите аккумулятор
- Вы услышате звуковой сигнал, затем 2 пика
- После 2 пиков переведите рычажок регулятора газа в минимальное (крайнее нижнее) положение
- Вы услышите несколько пиков (количество пиков указывает на тип аккумулятора (3 пика - для 3S аккумулятора и т.д), затем 1 длинный звуковой сигнал, извещающий об успешном получении и сохранении минимального значения ШИМ для газа, и о том, что калибровка завершена
- Отсоедините аккумулятор
- Если ESC не откалибровался, то канал газа на пульте должен быть реверсирован
- Если вы всё ещё испытываете трудности с калибровкой после применения этих методов, попробуйте уменьшить на 50% трим газа.
После калибровки аппаратуры управления нужно задать полетные режимы, которые будут включаться с пульта управления. Для этого в левой колонке МР переходим в раздел Flight Modes. Если переключать ранее запрограммированные на пульте управления кнопки режимов, то зеленым цветом будет отображаться соответствующие Flight Mode. Остается только выбрать нужный режим из выпадающего списка. По окончании не забыть нажать для сохранения кнопку Save Modes.
Следующий параметр, который надо настроить, это показатель заряда аккумулятора. Подробно об этом рассказано в статье "Радиоуправляемые самолеты. Бортовое питание".
В завершении осталось настроить систему безопасности полета FailSafe - ради чего все и затевалось. Для этого переходим в соответствующий раздел и указываем необходимые нам значения. Например, возврат на точку взлета при потери сигнала с пульта. И возврат домой при понижении напряжения питания.
Теперь все готово к первым полетам!
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks