Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.
Посмотреть как на практике осуществляется автоматический взлет и посадка самолета с установленным полетным контроллером можно в этом видео:
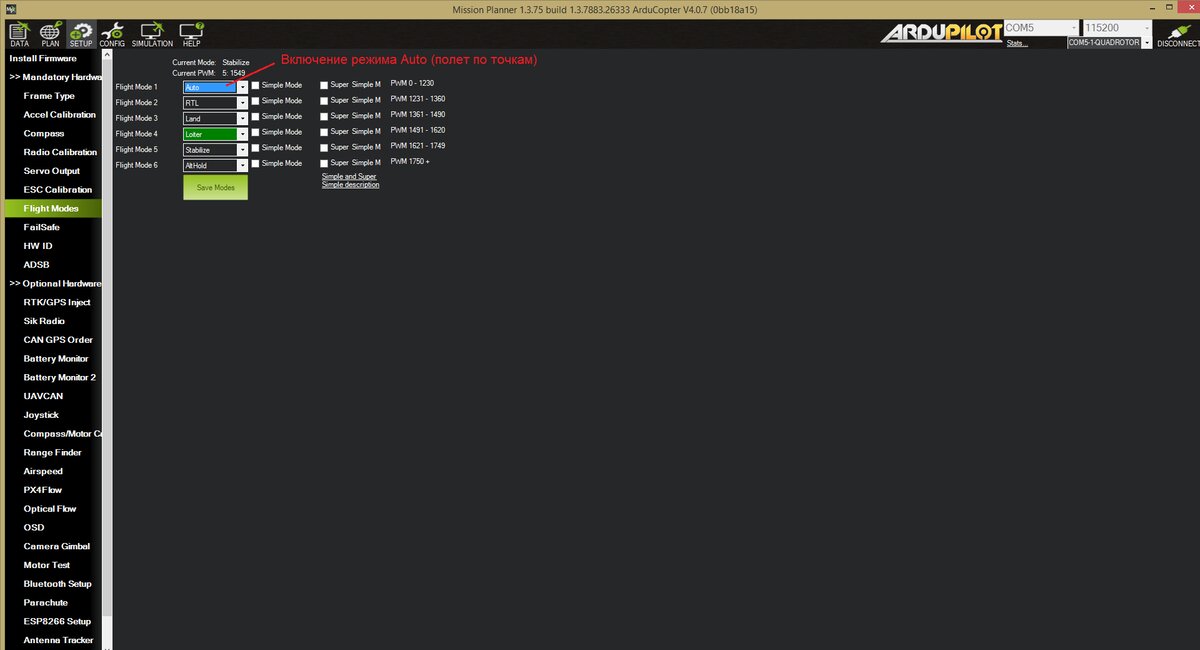
После того, как все необходимое оборудование установлено на борт, настроено, протестировано и успешно совершены первые полеты в различных режимах, можно перейти к настройкам автоматического взлета и посадки самолета. Для этого в полетном контроллере должна быть настроена возможность включения режима Auto.
При включении режима Auto самолет начинает выполнять задание полета по точкам, которые заранее были записаны в его память. Соответственно, можно задать такие точки, которые будут началом старта (взлет) и окончанием полета (посадка). Если точку посадки не задавать, то после окончания выполнения программы самолет может оставаться в небе и продолжать движение по кругу на определенной высоте с заданным радиусом вокруг последней точки или вернуться к точке взлета и кружить вокруг нее до тех пор, пока пилот не возьмет управление на себя. Все зависит от того, как будет запрограммировано поведение в последней точке.
Кратко опишу, как на практике осуществляется автовзлет, полет по точкам и автопосадка. Взлетаем так: ставим самолет на взлетную полосу (или катапульту, или готовность для запуска с руки) и переводим контроллер в режим Auto. Самолет сам включает двигатель, разгоняется до заданной скорости и начинает осуществлять подъем (если запуск с катапульты или руки, то его надо будет только метнуть вперед, двигатель включится сам). После отрыва от земли, самолет набирает заданную в программе высоту, по достижении которой направляется к первой указанной в программе точке и далее двигается по всем остальным, вплоть до конца выполнения программы. В любой момент, когда самолет уже в небе, (пока он не дошел по программе до точки посадки) можно перейти в режим полета в Manual и просто полетать, полностью управляя самолетом в ручном режиме. Можно так же перейти в любой другой режим и самолет прекратит выполнять программу и будет делать действия согласно новому режиму. Всегда можно обратно вернуться в режим Auto и самолет перейдет к продолжению выполнения программы с того момента, как она была прервана (важно - он не будет выполнять программу заново без дополнительных действий через Mission Planner).

Если Вы взлетели в обычном ручном режиме, а потом решили перейти в режим Auto, где запрограммирован автовзлет и автопасадка, то контроллер сравнит существующую высоту с запрограммированной высотой взлета и, если она равна или больше этого значения, сразу перейдет к полету по точкам и посадке.
Настройка полетов по точкам, в том числе точка взлета и точка посадки, осуществляется в программе Mission Planner, в разделе PLAN верхнего панели главного меню. На экране карты надо выбрать местность, где планируется осуществлять полеты. После этого выставляем необходимые нам точки полета, высоту в каждой точке и точку посадки.
Первая точка - точка взлета. Выбираем для нее команду TAKEOFF. Обязательно указываем угол взлета 20 градусов (следующая колонка после Команда), иначе самолет будет ехать по земле. Больше 20 градусов устанавливать угол взлета не рекомендуется (мотор может не вытянуть). В колонке Alt указываем высоту, на которую должен подняться самолет перед тем, как начать полет по точкам. В моем случае я указал 10 метров. Как только самолет поднимется на эту высоту он возьмет курс на точку 2. В зависимости от ветра и аэродрома самолет на взлетной полосе для запуска может быть установлен в любом удобном направлении. Поэтому координаты в колонках Lat и Long ставим в 0. Тогда он начнет движение по прямой, пока не достигнет указанной высоты и только потом повернет на следующую точку.
В следующих точках при минимальных настройках указываем только высоту. Если обратиться к первоисточникам, то можно настроить в любой точке вращение по кругу определенное количество раз с определенным радиусом. Здесь возможен творческий подход. Главное, чтобы заряда аккумулятора хватило для реализации всего полета.
Следующая важная точка - точка посадки. Для нее выставляем команду LAND и высоту в колонке Alt равную 0. Надо понимать, что предпоследняя точка должна находиться на достаточном удалении от точки посадки и на высоте, которая на заставила бы самолет пикировать резко вниз. В моем случае я выбрал предпоследнюю точку, находящуюся на прямой оси с точкой посадки на расстоянии 70 и высотой 10 метров. Ваши параметры могут отличаться в зависимости от модели и размера самолета. Опытным путем при ручной посадке каждый пилот знает с какой высоты и на каком расстоянии начинать сажать свою машину.
Далее, через Mission Planner и меню Config - Full Parameter List устанавливаем следующие параметры:
Автовзлет:
THR_SUPP_MAN = 0 чтобы запретить ручной газ. Тогда мотор включиться сам через указанное время задержки при переключении в режим AUTO или TAKEOFF.
TKOFF_THR_DELAY = 50 задержка запуска двигателя (5 сек.). TKOFF_THR_MINACC = 0 чтобы исключить активацию полного газа от толчков.
TKOFF_THR_MINSPD = 0 двигатель должен включиться сразу по истечению времени задержки, т.к. запуск не с катапульты, а с земли (снега, воды). TECS_PITCH_MAX – 20 максимальный угол взлета
Посмотреть: Параметры пидов. TKOFF_THR_MAX 100 газ в максимальный режим работы – проверить. TKOFF_THR_SLEW 30 плавное увеличение газа до 100% - при 30 будет увеличение до 100; за 3,3 сек.
Автопасадка:
Последняя точка перед посадкой – высота 10 м.
LAND_FLARE_ALT = 5 - высота выравнивания (рекомендуется для мелких самолетов ставить от 2 до 5 метров, для больших от 10 до 30. LAND_PITCH_CD = 300 минимальный угол по питчу при посадке (3 гр.) TECS_LAND_SINK вертикальную скорость посадки (можно не ставить. LAND_FLARE_SEC Время до приземления (не изменял). TECS_LAND_ARSPD -1 Воздушная скорость захода на посадку -1 параметр отключен, т.к. у меня нет датчика скорости, она измеряется по GPS. THR_MAX - поставил 100 (по умолчанию 75)%
Посмотреть: Параметры пидов. TKOFF_THR_MIN = 10 газ в минимальный режим работы – проверить.
Удачных полетов!
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks