Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.
Правильно организованное электропитание на борту самолета является гарантом безотказной работы всех модулей и минимизирует риски непредвиденных ситуаций в полете. Поэтому необходимо тщательно прорабатывать схему питания для каждой модели в зависимости от того, какие потребители энергии (двигатели, сервоприводы дополнительные внешние модули) установлены. Разработчики полетных контроллеров рекомендуют использовать специально разработанные подули - Power Module (РМ).
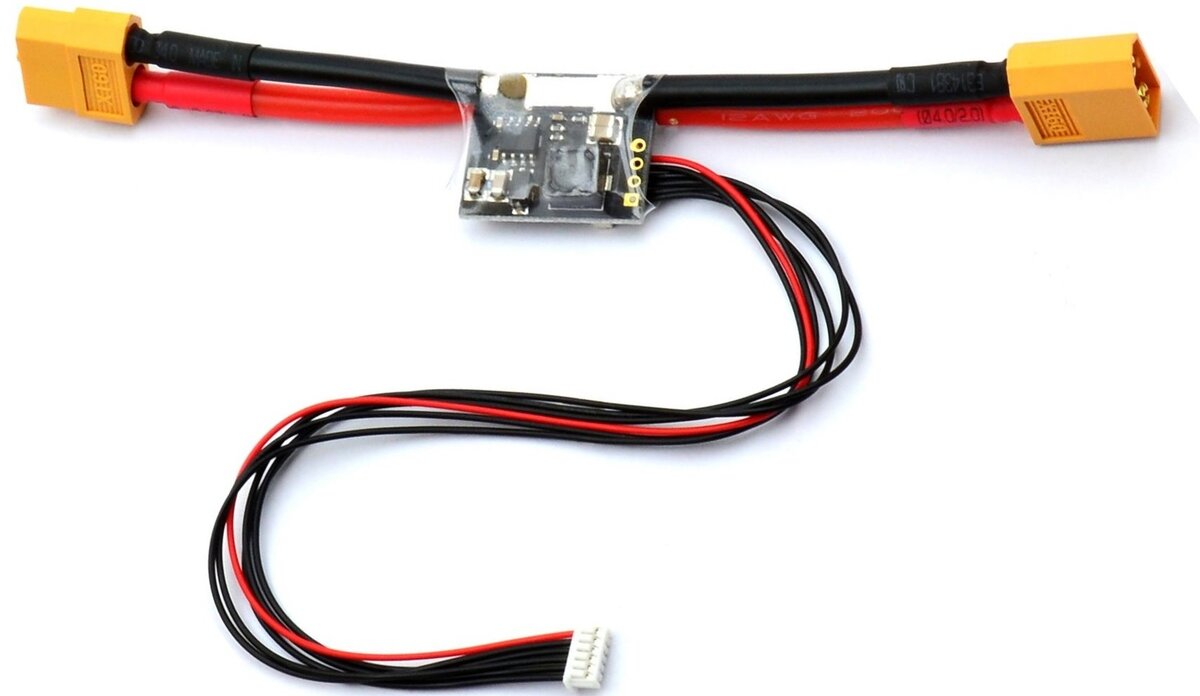
Разработанный для контроллера APM (он так же подходит для Pixhawk) модуль предназначен не только для подачи питания на контроллер и дополнительную периферию. Он так же является средством передачи данных о напряжении батареи и потребляемом токе. Эти данные очень важны. Они передаются пилоту через передатчик телеметрии и позволяют контролировать состояние аккумулятора, своевременно предупредить о скором его разряде, а так же включить защитный режим (например возврат к точке взлета).

Основные характеристики РМ:
Макс. входное напряжение - 18В;
Макс. ток нагрузки - 90А;
Выходные параметры стабилизатора - 5.3В;
Макс. ток стабилизатора - 2,25А
Использование данного модуля является самым простым и недорогим решением, но у него есть свои недостатки, о которых следует знать и учесть при реализации схемы питания. Перечислю их. Следуя характеристикам, максимальное напряжение на входе не должно превышать 18В, а это значит, что использовать аккумулятор больше 4S не получится. Максимальный ток стабилизатора 2.25А. Этого тока хватит только для питания самого контроллера, приемника и периферийных устройств - GPS и телеметрии. Запитывать от него сервоприводы и другие модули нельзя, поскольку это может привести срабатыванию защиты стабилизатора по превышению тока. Максимальный общий ток при работе всех модулей и максимальных оборотах двигателей не должен превышать 90А, иначе сработает общий предохранитель. В продаже можно найти аналогичные модули с входным напряжением до 50В и током до 120А, но их цена будет в разы больше.
Для питания сервоприводов и модулей с повышенным потреблением тока (например видеопередатчик и OSD модуль) необходимо использовать отдельный стабилизатор напряжения. Часто в его роли используется стабилизатор 5В, встроенный в регулятор двигателя ESC, так называемый блок исключения батареи - Battery Eliminator Circuit (BEC). Данный стабилизатор обеспечивает подачу тока от 2 до 5 Ампер. Но, тут тоже есть некоторые особенности. Необходимо знать, по какой схеме он собран. Как правило, в недорогих ESC, это обычный линейный стабилизатор с максимальным выходным током до 2А. В линейных стабилизаторах напряжение больше 5 Вольт срезается и преобразуется в тепло. Чем больше нагрузка, тем больше ток, а значит больше нагревается стабилизатор и есть опасность выхода его из строя или отключения от перегрева. КПД у такого стабилизатора уменьшается при увеличении тока, впустую сажая аккумулятор.
Поэтому стабилизатор от ESC имеет смысл использовать только в том случае, если нагрузка не велика или стабилизатор не линейный, а импульсный. В характеристиках ESC указывается тип BEC, и как правило, у импульсных BEC ток от 3 до 5 Ампер. Импульсный стабилизатор работает путем быстрого (высокочастотного) включения и выключения напряжения на трансформаторе, с вторичной обмотки которого снимается необходимое напряжение 5В. При этом, за счет электромагнитной трансформации (индукции), практически исключается перегрев стабилизатора и достигается КПД до 90%. В характеристиках ESC такой стабилизатор часто обозначают BEC быстрого переключения.
Справедливости ради надо сказать, что импульсный стабилизатор может быть источником электропомех для приемников, поэтому ESC следует размещать подальше от приемников и антенн.
В качестве альтернативы использования встроенного в ESC стабилизатора напряжения можно приобрести отдельный модуль - универсальный блок исключения батареи Universal Battery Eliminator Circuit (UBEC). Это небольшой по размеру и весу модуль (порядка 11 грамм). Напряжение на его вход подается так же, как на ESC и может быть от 5.5 до 26 Вольт, номинальный ток нагрузки 3 - 5 Ампер. Перемычкой можно задать выходное напряжение 5 или 6 Вольт. Он так же может давать помехи в эфир, поэтому надо обращать внимание на наличие защитного экрана и расположение относительно приемников и антенн.
В зависимости от принятого решения о способах питания, схема подключения может несколько меняться. Рассмотрим вариант запитывания контроллера, приемника, телеметрии и GPS от Power Module, а сервоприводов от стабилизатора ESC. Для контроллера APM необходимо удалить перемычку JP1. Тем самым разделяются цепи питания от ESC и PM. Трехконтактный разъем от ESC подключается к 3 каналу OUTPUTS, а сервоприводы элеронов, руля высоты и руля поворотов к 1, 2, и 4 порту соответственно. Питание для дополнительных модулей можно брать со свободных контактов "+" "-" OUTPUTS.
У контроллера Pixhawk подключение происходит точно так же, только никаких перемычек удалять не надо. В нем шина питания разъемов MAIN OUT изначально изолирована от шины питания контроллера модулем PM.
Если принимается решение сервоприводы и дополнительные модули запитывать от UBEC, то из разъема ESC надо удалить средний провод, а разъем выходного напряжения от UBEC воткнуть в свободные контакты "+" "-" OUTPUTS (для APM) или MAIN OUT (для Pixhawk).
При любом выборе питания непосредственно к самому аккумулятору подключается только модуль РМ. Все остальные модули, которые должны запитываться напряжением аккумулятора (ESC, UBEC и прочее), подключаются к силовому выходу PM. Это необходимо для того, чтобы правильно определялся потребляемый ток и вычислялся процент разряда батареи.
Теперь остается настроить контроллеры для правильного отображения информации о напряжении батареи и задать параметры включения режимов защиты. Для этого подключаем к контроллеру модуль PM в соответствующий разъем и соединяем контроллер по USB с компьютером. Подключаем к PM аккумулятор и запускаем программу Mission Planner. Подключаемся к контроллеру и выбираем в верхнем меню выбора экранов закладку SETUP. В левой колонке выбираем раздел Optional Hardware и переходим в раздел Battery Monitor
В строке Monitor выставляем значение показывать напряжение и ток (Analog Voltage and Current). В строке Sensor выбираем наш 3DR Power Module. В строке HW Ver выбираем нашу версию контроллера. Для APM это значение APM2.5+/ZealotF427 - 3DR Power Module, а для Pixhawk значение The Cube or Pixhawk. В строке Battery Capacite (емкость аккумулятора) выставляем соответствующую емкость. Это даст возможность контроллеру правильно вычислять процент заряда аккумулятора. Устанавливая галочку MP Alert on Low Battery включаем звуковое предупреждения в Mission Planner. При этом появиться три окна с вопросом, какую фразу произносить, при каких процентах заряда и каком напряжении.
После завершения настроек переходим в главный экран Mission Planner и в окне HUB смотрим значения напряжения и тока. Для сравнения точности показания нужно воспользоваться вольтметром, аккуратно подключившись к аккумулятору. Если показания различаются, то возвращаемся обратно в раздел Battery Monitor и в строке Sensor выставляем значение Other. В окне Calibration в строке Meassured battery voltage (измеренное напряжение батареи) выставляем значение, которое показывает вольтметр. Если вольтметра нет, или его точность под сомнением, то подключаем к контроллеру аккумулятор сразу после зарядки. Показания должны соответствовать значению полностью заряженной батареи. При необходимости корректируем.
Точность тока проверяем аналогично, только в разрез цепи питания аккумулятора включаем амперметр. Если значения расходятся, то в окне Calibration в строке Amperes per volt подбираем значение, чтобы в строке Current (Calced) значение совпадало с показаниями амперметра. Проверяем показания при разных нагрузках. На самом деле у РМ точность определения тока оставляет желать лучшего. Но, эти данные особой информации не несут, только общее представление, какая возникает нагрузка на батарею при разных режимах работы оборудования.
Последним этапом необходимо настроить систему защиты FailSafe при разряде батареи до определенного уровня. Для этого в том же экране Setup выбираем в левом столбце пункт Mandatory Hardware и переходим в раздел FailSafe. В правом окне Battery выставляем напряжение, при достижении которого срабатывает защита и выставляем режим, в который должен перейти самолет. Логично выставить RTL - возврат к точке взлета. При этом нужно помнить, что критичное напряжение разряда для LiPo аккумуляторов составляет 3,0В на каждой банке, ниже которого происходят невосстановимые процессы и потеря емкости. Поэтому порог срабатывания защиты обычно выбирают 3,4В на банку, поскольку самолету еще надо вернуться и сесть. Значит для аккумулятора 3S пороговое напряжение 10,2В, для 4S значение будет 13,6В.
На этом вопросы бортового питания можно считать решенными.
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks