В данном уроке мы рассмотрим подключение микроконтроллера PIC12F615, и проверим его работу помигав светодиодом.
Данный микроконтроллер имеет при небольших размерах неплохую конфигурацию и может пригодится когда необходимо обрабатывать пару сигналов:
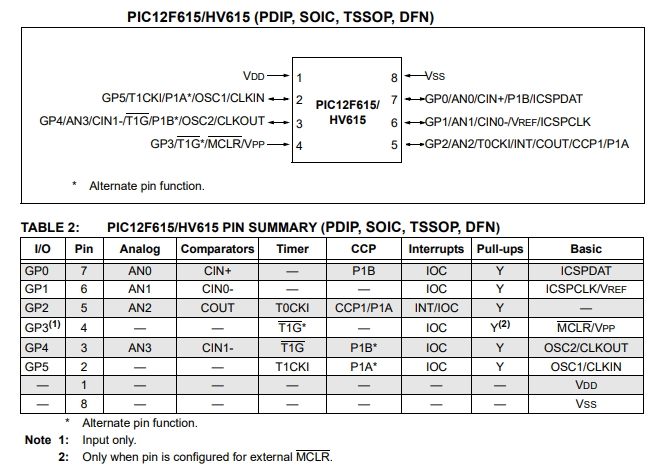
Параметры микроконтроллера PIC12F615:

Схема подключения микроконтроллера PIC16F615 к программатору PicKit3:
Данный микроконтроллер может работать на частоте 4Мгц или 8Мгц от внутреннего тактирования. Мы настроим данный микроконтроллер на 4Мгц.
Настройки фьюзов вынесем в заголовочный файл main.h:
ifndef MAIN_H
define MAIN_H
pragma config FOSC = INTOSCCLK
pragma config WDTE = OFF
pragma config PWRTE = OFF
pragma config MCLRE = ON
pragma config CP = OFF
pragma config IOSCFS = 4MHZ
pragma config BOREN = ON
endif
Так как у него всего один порт, настройка регистров немного упрощена – нам не нужно указывать номер порта, причем всего 4 бита отвечают за настройку ножек.
TRISIO – регистр, настраивает ножки на вход (логический 1) и выход (логический 0).
GPIObits.GPx -устанавливает высокий или низкий уровень на выходе ножки.
Программный код:
include <xc.h>
include "main.h"
define _XTAL_FREQ 4000000
void main(void) {
TRISIO = 0b1011;//GP2 - output
while (1){
GPIObits.GP2=1; // GP2 - haigt
__delay_ms (500);
GPIObits.GP2=0; // GP2 - low
__delay_ms (1500);
}
return;
}