Уравнения движения РН решаются с помощью электронных вычислительных машин (ЭВМ). Как правило, это сложный итерационный процесс. В то же время у проектантов и разработчиков средств выведения всегда существует потребность в быстром, оценочном ответе на вопрос о возможностях РН по выведению полезной нагрузки на заданную орбиту.
Ряд авторов разрабатывали методы приближенного аналитического решения уравнений движения РН при различных допущениях. Наиболее типичные из этих допущений следующие:
ускорение силы тяжести не зависит от высоты полета (модель «плоской» планеты);
аэродинамические силы пренебрежимо малы по сравнению с силой тяги;
реальное изменение какой-либо переменной заменяется ее приближенным выражением;
и другие.
Характерной особенностью всех классических подходов к решению задачи определения траектории КСВ является попытка имитировать полет реальной ракеты, а не его моделирование. С этой целью записываются уравнения относительно управляющего воздействия на ракету (с помощью угла атаки либо программы тангажа), как в случае реального управления полетом. Это приводило и приводит к нелинейным математическим зависимостям между управлением и траекторией. Отсюда – главная проблема таких задач - нелинейная краевая задача получения требуемых условий попадания на необходимую орбиту.
Наш подход другой. Мы предлагаем выбирать саму траекторию, а краевая задача при этом решится сама собой.
Любое моделирование связано с принятием системы допущений, которые делают решение модельной задачи приближенным к реальному.
Формулируя задачу поиска траектории полета КСВ при выведении спутника на орбиту, мы проанализировали, как геометрически выглядит реальная траектория с учетом тех ограничений, которые на нее накладываются в процессе полета.
Вот типичный вид такой траектории:

Здесь обращает на себя внимание два характерных участка: почти линейная зависимость H(V) в начале полета и криволинейная на участке выхода на орбиту.
Первая зависимость вытекает из формирования траектории гравитационного разворота когда угол атаки близок к нулю, а разворот траектории в вертикальной плоскости происходит в основном благодаря гравитационному полю планеты.
Вторая, криволинейная, часть траектории связана с наличием компромисса между центробежной силой, стремящейся расправить траекторию, и силой тяги двигателя, стремящейся ее согнуть, чтобы выйти в апсидальную точу орбиты
В следствие этих особенностей расчет траектории разбивается на три характерных участка:
- - вертикальный, связанный с уходом КСВ со стартового устройства на некоторую безопасную высоту;
- - гравитационный разворот;
- - выход на орбиту.
Читатель уже знаком с интегралами скорости и высоты полета для первых двух участков. Они показаны в предыдущих публикациях: об аэродинамических и гравитационных потерях скорости.
Характерной особенностью заключительной части траектории, является требование выхода КСВ на орбиту. Оно записывается в виде граничных условий.
Рассмотрим более подробно эти условия.
Для траектории, с выходом КСВ на круговую орбиты или в апсидальную точку эллиптической орбиты, необходимо выполнить условия:
- высота полета при V= Vк должна равняться Нк=Норб.;
- угол наклона траектории к местному горизонту в этот момент должен равняться нулю.
Наиболее подходящей функцией, обеспечивающей выполнение указанных условий, а также, близость предлагаемой аппроксимации к решению вариационной задачи, выразим r(V) в виде кубического сплайна:
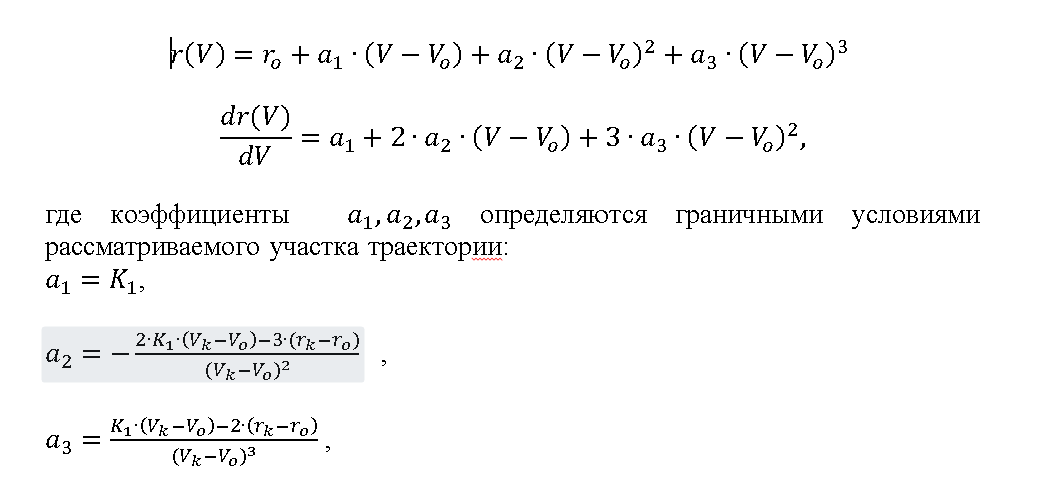
Для первых двух участков траектории выражения интегралов скорости и высоты полета имели зависимость от значения параметра μк – безразмерной массы КСВ, а на третьем участке, как видим, независимой переменной становится скорость полета. Необходим интеграл для вычисления μк на этом участке.
Вот его вид:
Таким образом, найдено решение задачи выведения спутника на орбиту в аналитическом виде и без итерационного процесса.