Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.

В предыдущей статье был описан модуль GPS, благодаря которому пилот, управляющий своей моделью, всегда знает ее географическое местоположение и может направлять на новые точки или дать команду вернуться обратно к месту взлета. И вот для того, чтобы модель понимала в какую сторону ей надо поворачивать и двигаться, необходимо наличие компаса. Как известно, компас - это устройство для определения сторон света в пространстве. Полетный контроллер должен четко знать, где у него находится север, юг, запад, восток. Тогда он будет давать правильные команды для перемещения в нужную точку. От качества работы и точности настройки компаса зависит поведение летательного аппарата в автоматическом режиме полета или при срабатывании системы защиты FailSafe, переводящей самолет в режим RTL - возврат к точке взлета.
При всей важности правильной работы магнитного компаса (он же датчик магнитного поля), это самое подверженное помехам устройство. Связано это с тем, что на разных территориях полета естественное магнитное поле земли может быть разным. На магнитный датчик могут влиять посторонние магнитные поля, например от высоковольтных линий электропередач, подземных кабелей или от бортовой электроники самого летательного аппарата. Именно поэтому компас желательно заново калибровать на каждом новом полётном месте, а в летательном аппарате стараться разместить его подальше от компонентов с электромагнитным излучением (электромоторов, сервоприводов, силовых проводов) и металлических деталей конструкции корпуса.
В зависимости от используемого полетного контроллера, магнитный компас может быть как интегрирован в него, так и подключаться отдельно, в виде дополнительного модуля. Например, в полноценном контроллере на базе Arduino APM 2.8 магнитный компас интегрирован в плату, но его можно отключить перемычкой, а в версии APM Pro mini его нет. Все полетные контроллеры Pixhawk оснащены интегрированным магнитным компасом. Основное отличие относительно использования компаса между контроллерами APM и Pixhawk заключается в том, что APM может работать только с одним магнитным датчиком (внешним или встроенным), а Pixhawk может одновременно работать с тремя компасами (одним встроенным и двумя внешними).
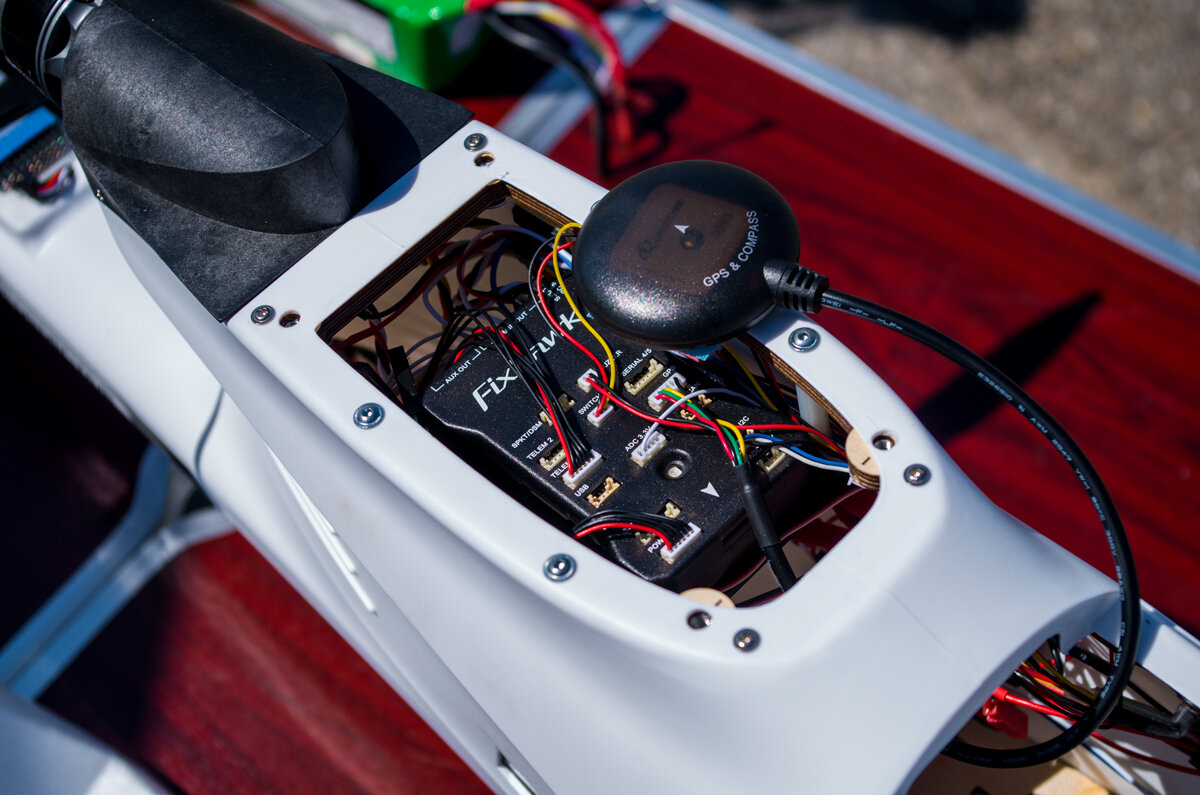
Поскольку наличие магнитного компаса без модуля GPS не имеет практического смысла, а GPS без компаса сможет разве что показать местоположение и скорость перемещения, то часто магнитный датчик встраивают непосредственно в модуль GPS. В этом случае у модуля есть дополнительный разъем, а на корпусе или плате изображена стрелка, указывающая направление компаса. Стрелка показывает, как должен быть размещен модуль на летательном аппарате - ее направление должно совпадать с передом модели.
Подключение внешнего магнитного компаса к полетному контроллеру происходит по шине I2C. Для APM и Pixhawk это 4-х контактный разъем DF-13. Все настройки производятся через программу Mission Planner при подключенном контроллере через пункт Compass в разделе Mandatory Hardware верхнего меню SETUP. Проверку работоспособности компаса, первоначальные настройки и предварительную калибровку можно сделать до установки контроллера в модель. Окончательную калибровку надо будет делать уже с полностью собранной моделью в месте, где предполагаются полеты.
В зависимости от конкретного типа полетного контроллера и магнитного датчика первоначальные настройки несколько отличаются друг от друга. В начале рассмотрим настройку на примере контроллера APM 2.8. В него уже интегрирован магнитный компас. И если Вы планируете использовать модуль GPS, у которого так же есть интегрированный магнитный датчик, то надо определиться, какой компас использовать. Если принимается решение использовать компас, встроенный в контроллер, то разъем от внешнего компаса модуля GPS просто не подключаем. Если же принято решение использовать внешний компас, то на APM необходимо физически отключить интегрированный в него компас, удалив джампер (перемычку) JP, расположение которого показано на картинке.
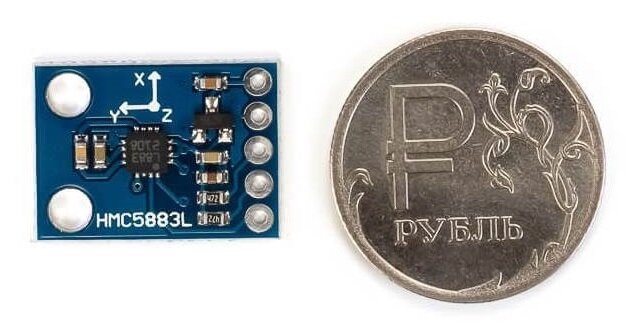
Подключаемся к Mission Planner и переходим в меню Setup, раздел Mandatory Hardware, пункт Compass. В окне Compass # 1 нужно установить галочку Use this compass (использовать этот компас). Если принято решение использовать компас контроллера, то убираем галочку Externally mounted ( наружное подключение). Если хотим использовать внешний компас, то галочку устанавливаем и в появившемся выпадающем списке выбираем, какое у нас расположение компаса. Дело в том, что в разных модулях GPS чип магнитного датчика может быть припаян по разному. Если он припаян вверх ногами (антенна GPS всегда должна быть вверху, а микросхемы могут быть припаяны с обратной стороны платы), то необходимо выбрать расположение Roll 180, что означает, перевернут на 180 градусов. Возможно Ваш магнитный датчик будет расположен в каком то другом положении относительно земли, тогда нужно будет выбрать соответствующее значение, чтобы контроллер правильно понимал данные. При использовании интегрированного в контроллер компаса галочку Externally mounted убираем. Еще одна интересная галочка - Automatically learn offsets (автоматическое обучение смещению) в окне General Compass должна дополнительно обучить компас во время полета и после этого сама сброситься. Но, к сожалению, эта функция работает только с прошивками версий 4.0, а для APM эти версии уже не выпускаются. Поэтому тут она бесполезна.
Далее переходим к тестовой калибровке компаса (основную будем делать в поле), нажав кнопку Live Calibration. При появлении трехосевой картинки координат начинаем вращать магнитный компас по всем направлениям, добиваясь заполнения всех белых квадратных точек. В случае успеха Mission Planner выдаст сообщение, что калибровка прошла успешно и запишет в память результаты калибровки. Для понимания, как вращать компас, рядом с кнопкой калибровки есть ссылка на видео в Youtube, где наглядно, на примере квадрокоптера, показана калибровка компаса. Понять, что компас настроен правильно, можно в главном меню Mission Planner, в окне HUD, по значению верхней шкалы, указывающей направление стрелки компаса. На этом первоначальные настройки компаса для контроллера APM можно считать завершенными.
Для контроллера Pixhawk настройки компаса несколько отличаются от настроек APM. Связано это с тем, что он может обрабатывать данные до трех одновременно работающих компасов (один интегрированный и два внешних). Поэтому, в том же пункте Compass, в правом окне надо будет указать, какие компасы мы используем, ставя соответствующие галочки Use compass 1 (2,3). Pixhawk сам умеет определять, какие компасы к нему подключены и какой из них внешний, а какой внутренний. На внешнем автоматически появляется галочка External. Так же он сам определяет ротацию (положение) чипа относительно земли. Остается только задать приоритет, какой компас главный. При наличии внешнего, я бы рекомендовал сделать его приоритетным. Считается, что у встроенного больше наводок. Для контроллера Pixhawk работает функция автоматического обучения смещению, поэтому имеет смысл поставить галочку Automatically learn offsets. После первых полетов и успешного обучения галочка сама сбросится. На время обучения нельзя включать режимы, использующие GPS (RTL, Auto и т.п.). Теперь остается только откалибровать компас. Жмем на кнопку Start и начинаем вращения, аналогичные с APM. Только теперь вместо трехосевых координат с точками для каждого компаса будет горизонтальный индикатор с растущей зеленой полоской по мере обучения компаса. При успешной калибровке каждого компаса Mission Planner выдаст соответствующие сообщения. Останется только перезагрузить контроллер и все изменения сохраняться.
На данном этапе все настройки компаса можно считать завершенными. Окончательная калибровка должна быть сделана перед первым взлетом на местности. Есть еще одно важное правило калибровки - она должна производиться на высоте не менее одного метра от земли.
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks