По принципу регулирования все системы автоматического регулирования подразделяются на четыре класса.
1. Система автоматической стабилизации - система, в которой регулятор поддерживает постоянным заданное значение регулируемого параметра.
2. Система программного регулирования - система, обеспечивающая изменение регулируемого параметра по заранее заданному закону (во времени).
3. Следящая система - система, обеспечивающая изменение регулируемого параметра в зависимости от какой-либо другой величины.
4. Система экстремального регулирования - система, в которой регулятор поддерживает оптимальное для изменяющихся условий значение регулируемой величины.
Для регулирования температурного режима систем электрического отопления используются в основном системы первых двух классов.
Системы автоматического регулирования температуры по типу действия можно разделить на две группы: периодические и непрерывные.
Автоматические регуляторы систем автоматического управления (САУ) по функциональным характеристикам делятся на пять типов: позиционные (релейные), пропорциональные (статические), интегральные (астатические), изодромные (пропорционально-интегральные), изодромные с предварительным и с первым. производная.
Регуляторы положения относятся к прерывистому ГВС, а регуляторы других типов называются непрерывным ГВС. Ниже рассмотрены основные характеристики позиционных, пропорциональных, интегральных и изодромных регуляторов, наиболее часто используемых в системах автоматической терморегуляции.
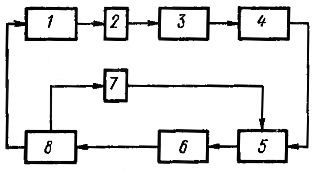
Функциональная схема автоматического регулирования температуры
(рис. 1) состоит из объекта регулирования 1, датчика температуры 2, программного устройства или задатчика уровня температуры 4, регулятора 5 и исполнительного устройства 8. Во многих случаях между датчиком и программным устройством ставится первичный усилитель 3, а между регулятором и исполнительным устройством - вторичный усилитель 6. Дополнительный датчик 7 применяется в изодромных системах регулирования.
В качестве датчиков температуры применяются термопары, термосопротивления (термисторы) и термометры сопротивления. Наиболее часто используются термопары.
Позиционные (релейные) регуляторы температуры
Позиционными называют такие регуляторы, у которых регулирующий орган может занимать два или три определенных положения. В электронагревательных установках применяются двух- и трехпозиционные регуляторы. Они просты и надежны в эксплуатации.
На рис. 2 показана принципиальная схема двухпозиционного регулирования температуры воздуха.
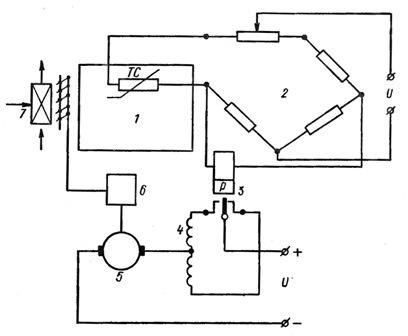
RTD, подключенный к одному из плеч измерительного моста 2, используется для контроля температуры в объекте контроля. Значения сопротивлений перемычки подбираются таким образом, чтобы перемычка была симметричной при определенной температуре, то есть напряжение на диагонали перемычки было равно нулю. При повышении температуры поляризованное реле 3, содержащееся в диагонали измерительного моста, включает одну из обмоток 4 электродвигателя постоянного тока, которая закрывает воздушный клапан перед ТЭНом 7 с редуктором 6, если температура падает, воздушный клапан открывается полностью.
При двухпозиционном регулировании температуры количество подаваемого тепла можно установить только на двух уровнях - максимальном и минимальном. Максимальное количество тепла должно быть больше, чем необходимо для поддержания заданной контролируемой температуры, а минимальное - меньше. В этом случае температура воздуха колеблется около заданного значения, т.е. устанавливается так называемый автоколебательный режим (рис. 3, а).
Линии, соответствующие температурам τn и τw, определяют нижний и верхний пределы мертвой зоны. Когда температура контролируемого объекта, снижаясь, достигает значения н, количество подводимого тепла мгновенно увеличивается, и температура объекта начинает повышаться. Достигнув значения w, регулятор снижает подвод тепла и температура понижается.
Скорость повышения и понижения температуры зависит от свойств контролируемого объекта и его временной характеристики (кривой ускорения). Колебания температуры не выходят за границы мертвой зоны, если изменения в подаче тепла сразу вызывают изменения температуры, то есть при отсутствии запаздывания контролируемого объекта.
По мере уменьшения мертвой зоны амплитуда колебаний температуры при τn = τw уменьшается до нуля. Однако для этого требуется, чтобы подача тепла изменялась с бесконечно высокой частотой, что крайне сложно реализовать на практике. Есть задержка для всех реальных объектов управления. Процесс регулирования в них происходит примерно так.
При снижении температуры контролируемого объекта до значения τн подача тепла сразу же меняется, однако из-за задержки температура продолжает некоторое время падать. Затем она увеличивается до значения τw, при котором подвод тепла сразу уменьшается. Некоторое время температура продолжает повышаться, а затем из-за уменьшения подачи тепла температура падает, и процесс повторяется снова.
На рис. 3, б приведена статическая характеристика двухпозиционного регулятора. Из нее следует, что регулирующее воздействие на объект может принимать только два значения: максимальное и минимальное. В рассмотренном примере максимум соответствует положению, при котором воздушный клапан (см. рис. 2) полностью открыт, минимум - при закрытом клапане.
Знак управляющего воздействия определяется знаком отклонения контролируемого значения (температуры) от заданного. Величина регулирующего воздействия постоянна. Все двухпозиционные регуляторы имеют зону гистерезиса α, которая возникает из-за разницы между токами срабатывания и отпускания электромагнитного реле.
Пример использования двухпозиционного регулирования температуры: автоматическое регулирование в печах нагрева сопративлением.
Пропорциональные (статические) регуляторы температуры
В случаях, когда требуется высокая точность управления или автоколебательный процесс неприемлем, используются контроллеры с непрерывным процессом управления. Сюда входят пропорциональные контроллеры (контроллеры P), которые подходят для управления широким спектром технологических процессов.
В тех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования. К ним относятся пропорциональные регуляторы (П-регуляторы), пригодные для регулирования самых разнообразных технологических процессов.
В системах автоматического регулирования с П-регуляторами положение регулирующего органа (у) прямо пропорционально значению регулируемого параметра (х):
y=k1х,
где k1 - коэффициент пропорциональности (коэффициент усиления регулятора).
Эта пропорциональность сохраняется до тех пор, пока регулятор не достигнет крайних положений (концевых выключателей).
Скорость движения регулирующего органа прямо пропорциональна скорости изменения контролируемого параметра.
На рис. 4 показана принципиальная схема системы автоматического регулирования температуры воздуха в помещении при помощи пропорционального регулятора. Температура в помещении измеряется термометром сопротивления ТС, включенным в схему измерительного моста 1.
При заданной температуре мост уравновешен. При отклонении регулируемой температуры от заданного значения в диагонали моста возникает напряжение разбаланса, величина и знак которого зависят от величины и знака отклонения температуры. Это напряжение усиливается фазочувствительным усилителем 5, на выходе которого включена обмотка двухфазного конденсаторного двигателя 4 исполнительного механизма.
Привод перемещает регулирующее тело, изменяя поток теплоносителя в теплообменнике 3. Одновременно с перемещением регулирующего тела изменяется сопротивление одного из плеч измерительного моста, поэтому температура, при которой мост находится сбалансированный.
Таким образом, благодаря жесткой обратной связи каждое положение регулирующего тела соответствует своему собственному температурному равновесному значению.
Пропорциональный (статический) регулятор характеризуется остаточной неравномерностью регулирования.
В случае скачкообразного отклонения нагрузки от заданного значения (в момент t1) регулируемый параметр придет по истечении некоторого отрезка времени (момент t2) к новому установившемуся значению (рис. 4). Однако это возможно только при новом положении регулирующего органа, то есть при новом значении регулируемого параметра, отличающегося от заданного на величину δ.
Недостатком пропорциональных регуляторов является то, что каждому значению параметра соответствует только одно конкретное положение элемента управления. Чтобы поддерживать заданное значение параметра (температуры) при изменении нагрузки (потребления тепла), регулятор должен занять другое положение, соответствующее новому значению нагрузки. В пропорциональном регуляторе этого не происходит, что приводит к остаточному отклонению регулируемого параметра.
Интегральные (астатические регуляторы)
Интегрированные (астатические) регуляторы — это регуляторы, в которых, когда параметр отклоняется от заданного значения, регулирующий элемент движется более или менее медленно и все время в одном направлении (в ходе хода), пока параметр не принимает заданное значение. Направление движения элемента управления изменяется только тогда, когда параметр превышает заданное значение.
В интегральных регуляторах электрического воздействия обычно искусственно создается мертвая зона, в которой изменение параметра не вызывает перемещений регулирующего органа.
Скорость движения регулирующего органа в интегральном контроллере может быть постоянной и переменной. Особенностью интегрального регулятора является отсутствие пропорциональной зависимости между установившимися значениями контролируемого параметра и положением регулирующего органа.
На рис. 6 приведена принципиальная схема системы автоматического регулирования температуры при помощи интегрального регулятора. В ней в отличие от схемы пропорционального регулирования температуры (см. рис. 4) нет жесткой обратной связи.
В интегральном регуляторе скорость регулирующего органа прямо пропорциональна величине отклонения регулируемого параметра.
Процесс интегрального регулирования температуры при скачкообразном изменении нагрузки (расхода тепла) отображен на рис. 7 с помощью временных характеристик. Как видно из графика, регулируемый параметр при интегральном регулировании медленно возвращается к заданному значению.
Изодромные (пропорционально-интегральные) регуляторы
Изодромное управление имеет свойства пропорционального и интегрального управления. Скорость движения регулирующего органа зависит от величины и скорости отклонения от контролируемого параметра.
Если параметр управления отклоняется от заданного значения, управление осуществляется следующим образом. Во-первых, регулирующий орган перемещается в зависимости от величины отклонения регулируемой переменной, т. Е. Имеет место пропорциональное управление. Затем контроллер совершает дополнительное движение, необходимое для устранения остаточной неровности (интегральное управление).
Изодромная система контроля температуры воздуха (рис. 8) может быть достигнута путем замены жесткой обратной связи в цепи пропорционального управления (см. Рис. 5) на упругую обратную связь (от корпуса регулятора к двигателю сопротивления обратной связи). Электрическая обратная связь в изодромной системе осуществляется потенциометром и вводится в систему управления через контур, содержащий сопротивление R и емкость C.
Во время переходных процессов сигнал обратной связи вместе с сигналом отклонения параметра влияет на последующие элементы системы (усилитель, электродвигатель). В случае стационарного регулирующего тела, в каком бы положении он ни находился, сигнал обратной связи падает, когда конденсатор C заряжается (в установившемся состоянии он равен нулю).
Для изодромного регулирования характерно, что неравномерность регулирования (относительная погрешность) уменьшается с увеличением времени, приближаясь к нулю. В этом случае обратная связь не вызовет остаточных отклонений от контролируемого значения.
Таким образом, изодромный контроль приводит к значительно лучшим результатам, чем пропорциональный или интегральный контроль (не говоря уже о позиционном контроле). Пропорциональное управление из-за наличия жесткой обратной связи происходит практически мгновенно, изодромное - медленнее.
Программные системы автоматического регулирования температуры
Для реализации программного управления необходимо постоянно воздействовать на заданное значение (заданное значение) контроллера, чтобы контролируемое значение изменялось по установленному закону. Для этого блок настройки контроллера поставляется с программным компонентом. Это устройство используется для определения закона изменения уставки.
Во время электрического обогрева исполнительный механизм автоматики может воздействовать на включение или выключение секций электронагревательных элементов, таким образом изменяя температуру обогреваемой установки в соответствии с заданной программой. Программный контроль температуры и влажности воздуха широко применяется в установках искусственного климата.