Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.
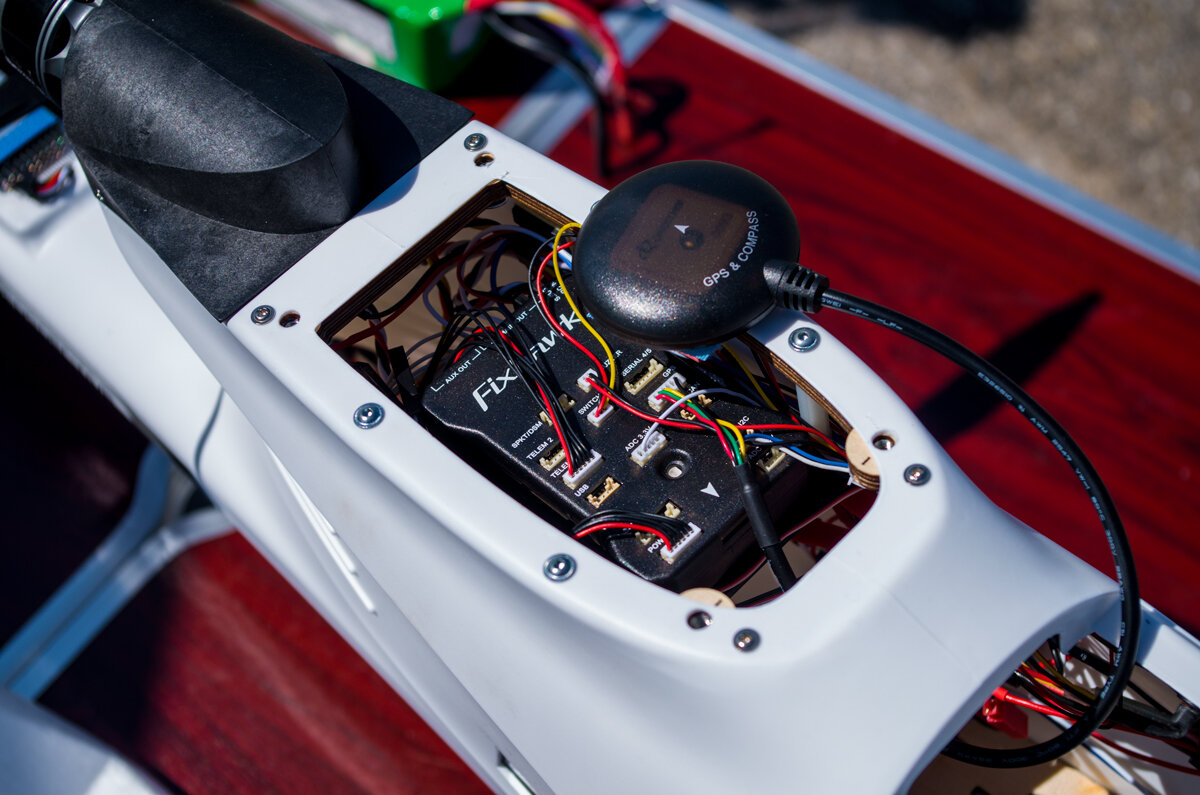
Для настройки полетного контроллера и всей электроники летательного аппарата, а так же для контроля управления полетами и их планирования, необходимо специализированное программное обеспечение, которое умело бы все это делать, было интеллектуально понятным и удобным в использовании. Учитывая данные требования, специально для полетного контроллера APM (ArduPilot Mega) была разработана программа наземного пункта управления с открытым исходным кодом - Mission Planner (полное название Mission Planner Ground Control Station). Позднее, с появлением новых контроллеров Pixhawk, их поддержка была так же реализована в Mission Planner, что дало возможность, имея несколько вариантов полетных контроллеров, использовать для настройки и управления единый комплекс. Есть и другие альтернативные программы, например QGroundControl. Но, по моему мнению, Mission Planner самый распространенный "народный" инструмент с множеством описаний в Интернете, удобным, интуитивно понятным функционалом. Поэтому, для настроек контроллеров APM и Pixhawk я предлагаю использовать именно его. Различия в настройках этих контроллеров минимальны и я их укажу по ходу написания материала. В остальном все примеры и высказывания будут справедливы для двух вариантов контроллеров.
В данной статье не преследуется задача дать полное описание этой программы и всех ее возможностей. Информации в Интернете по использованию Mission Planner предостаточно. Просто начинающим авиамоделистам хочу предложить ее для освоения и использования, поэтому в дальнейших примерах буду упоминать именно ее.
Основные возможности Mission Planner:
- Загрузка аппаратно-программного обеспечения (firmware или прошивки) в плату полетного контроллера и телеметрии.
- Начальная установка, выбор конфигурации, и точная настройка летательного аппарата для получения оптимальных рабочих характеристик.
- Планирование, сохранение и загрузка отдельных полетов с обычным вводом путевых точек методом «point-and-click» (указал и щелкнул) на картах Google или на других картах.
- Загрузка и анализ журналов полетов.
- Взаимодействие с пилотажным имитатором на ПК для создания полномасштабного аппаратно-программного имитатора БЛА.
- Отслеживание состояния летательного аппарата в процессе эксплуатации.
- Ведение журнала телеметрических измерений, содержащего гораздо больше информации, чем журналы данных встроенного автопилота.
- Просмотр и анализ журналов телеметрических измерений.
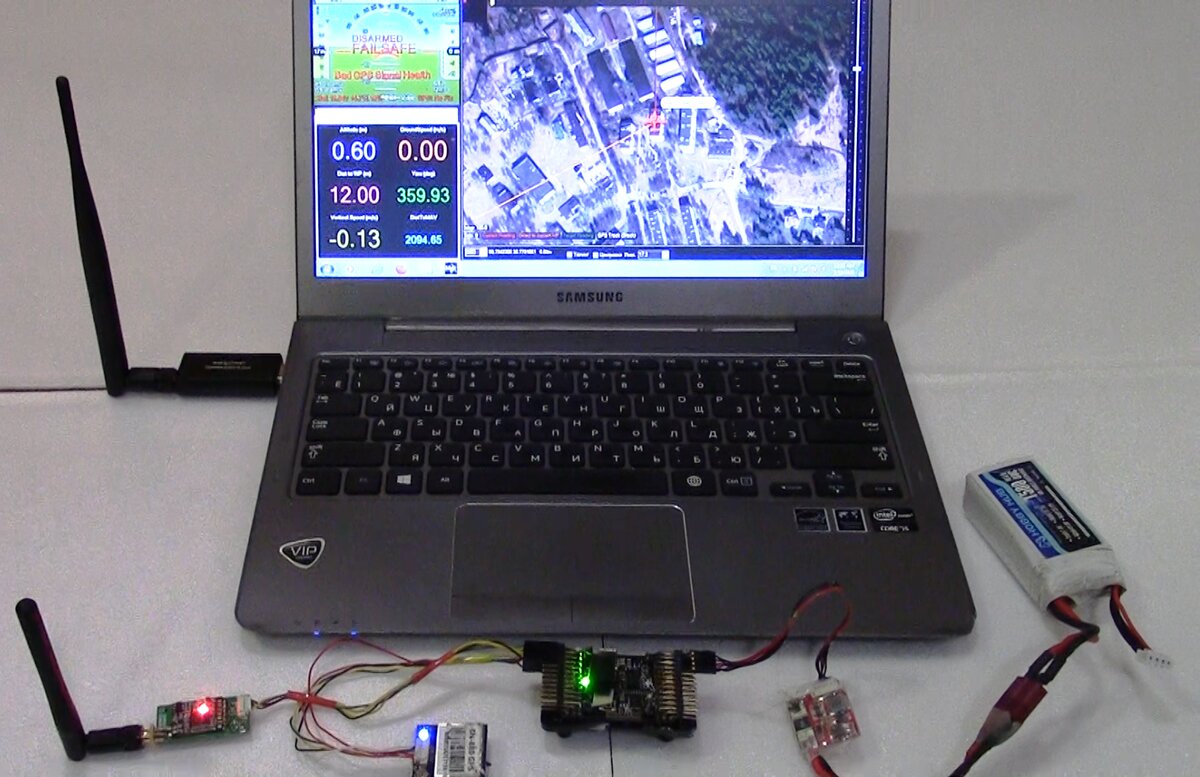
Mission Planner можно установить на компьютер или ноутбук под управлением Windows (ссылка на дистрибутив). Так же есть варианты для установки на планшет или смартфон через приложения в Google Play или App Store. Подключение к контроллеру осуществляется либо через USB кабель, либо через радиоканал телеметрии.
Программа имеет несколько основных экранов, переключение между которыми осуществляется путем выбора нужного в верхнем горизонтальном меню.
По умолчанию, при запуске программы открывается экран DATA - главный экран полетов.
Экран PLAN - используется для планирования полета по точкам. С помощью экрана SETUP осуществляются все необходимые основные настройки летательного аппарата (ЛА). Экран CONFIG необходим для точной настройки конфигурации ЛА, включения, отключения функций, установок параметров и данных. Описание всех этих экранов я постараюсь сделать позже, по мере настройки ЛА. Сейчас подробно остановлюсь на экране DATA.
Описание функционала главного экрана:
Экран полётных данных по умолчанию, состоит из трех частей. Верхняя левая часть - окно HUD (Heads-up Display). Подробнее его описание рассмотрим ниже.
Нижняя левая часть - меню с кнопками действия. В зависимости от выбранного меню может отображать различную информацию. По умолчанию отображается меню Quick с выводом основных данных параметров полета (высота, горизонтальная и вертикальная скорость, отклонение, дистанция до точки, дальность аппарата от места взлета).
Правая часть - навигационная карта (по умолчанию Google Maps) на которой отображаются следующие параметры полёта:
- Красная линия - фактический курс, направление носа (переда) ЛА.
- Зелёная линия - курс назначения с учётом коррекции по треку.
- Чёрная линия - курс, определённый по данным, полученным от GPS (обычно отличается от фактического).
- Жёлтая линия - направление на текущую маршрутную точку, к которой исполняется полёт.
- Desired turn radius - расчётный радиус поворота
- GPS reported altitude - высота по данным GPS
- Latitude - широта
- Longitude - долгота
- Track of recent travel - Трек недавнего перемещения
Подробное описание показателей окна HUD:
- Air speed или Ground speed - скорость относительно земли (или скорость относительно воздуха, если установлен соответствующий датчик)
- Сrosstrack error and turn rate - ошибка следования треку и скорость поворота
- Heading direction - Курс (направление носа ЛА)
- Bank angle - Угол крена
- Wireless telemetry connection - Качество передачи телеметрийных данных (% потерянных пакетов)
- GPS time - время по данным, полученным от GPS
- Altitude - высота по данным барометра (синяя метка показывает скорость изменения высоты).
- Air speed - воздушная скорость (относительно воздуха), показывается только при наличии датчика.
- Ground speed - скорость относительно земли
- Battery status - состояние батареи
- Artificial Horizon - искусственный горизонт, (всегда реверсивен по отношению к крену ЛА).
- Pitch angle - Угол тангажа
- GPS status - состояние GPS-модуля
- Distance to current waypoint > Current waypoint number - расстояние до текущей точки маршрута и её номер
- Current autopilot mode - текущий режим автопилота
На этом первое знакомство с программой Mission Planner закончим и перейдем к следующим разделам.
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks