Данная статья является продолжением темы повышения безопасности полетов радиоуправляемых самолетов путем установки на борт полетного контроллера.
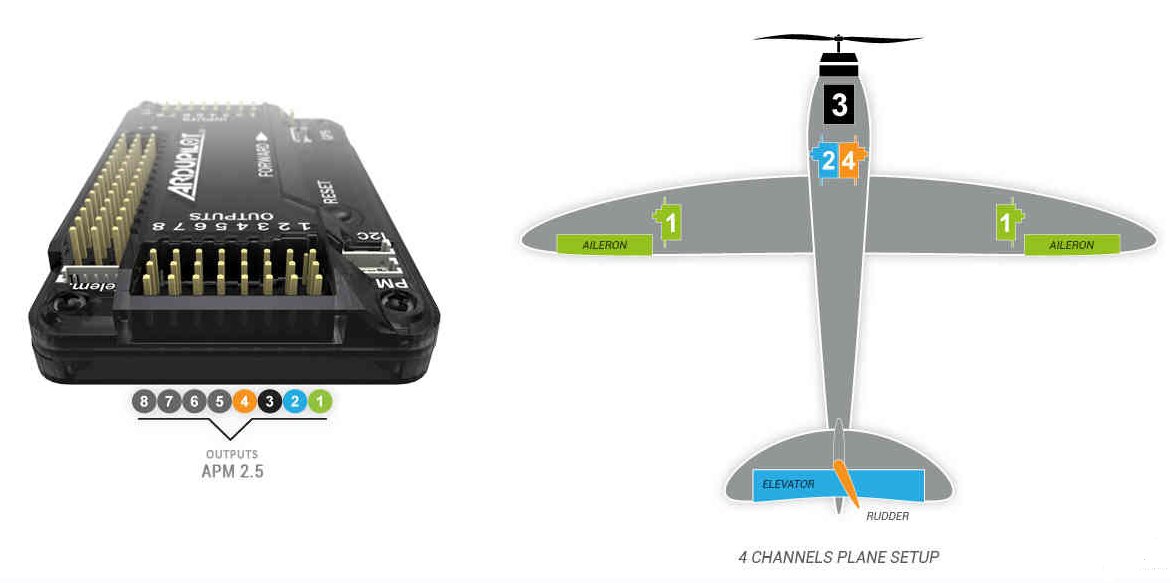
Общие понятия, что такое приемник и передатчик я описал в своей статье "Радиоуправляемые самолеты. Электроника". Здесь постараюсь описать какие требования к ним предъявляются при установке на самолет полетного контроллера. Первым делом определимся с количеством необходимых каналов. Для обычного самолета нужны следующие каналы: канал №1 - элероны, канал №2 - руль высоты, канал №3 - мотор, канал №4 - руль поворотов. У летающего крыла и всех самолетов, где нет руля поворотов (используются флапероны), канал №4 свободен и его можно назначить для других целей. Если у самолета есть закрылки, то это еще один канал. Убирающиеся шасси потребуют так же своего канала.
Для работы с полетным контроллером понадобятся дополнительные каналы. По каналу №5 принимаются команды выбора режимов полета. Поэтому данный канал надо зарезервировать и освободить, если он был занят. Максимальное количество режимов, заложенное в программе контроллера и наземной станции Mission Planner - шесть. Каждой определенной частоте импульсов пятого канала соответствует отдельный режим. И тут начинаются "танцы с бубном". Обычно на всех полноценных программируемых пультах есть только трехпозиционный тумблер. Его можно назначить на 5-й канал, но это будет только три режима полета. А как сделать переключение 6-ти режимов?... И вот тут всплывает первое различие между APM и Pixhawk.
К контроллеру APM радиоприемник подключается по протоколу PWM (ШИМ) — Pulse Width Modulation. Здесь каждый канал это отдельный кабель. Значит какой то канал можно подключить к контроллеру, а какой то нет. Что это дает? Это дает нам возможность смиксировать на передатчике два переключателя (два канала) - трехпозиционный, подключенный к 5-ому каналу и 2-х позиционный, подключенный к 6-ому каналу. В итоге, на шестом канале мы получим шесть позиций нужных нам частот импульсов (три значения позиций трехпозиционного переключателя при одном положении двухпозиционного, потом переключаем двухпозиционный и получаем еще три значения позиций трехпозиционного). В этом случае, при соединении приемника с контроллером, выход 5-ого канала приемника мы оставляем незадействованным, а 6-ой канал приемника подключаем к входному 5-му каналу контроллера APM. Как настроить передатчик расскажу ниже.
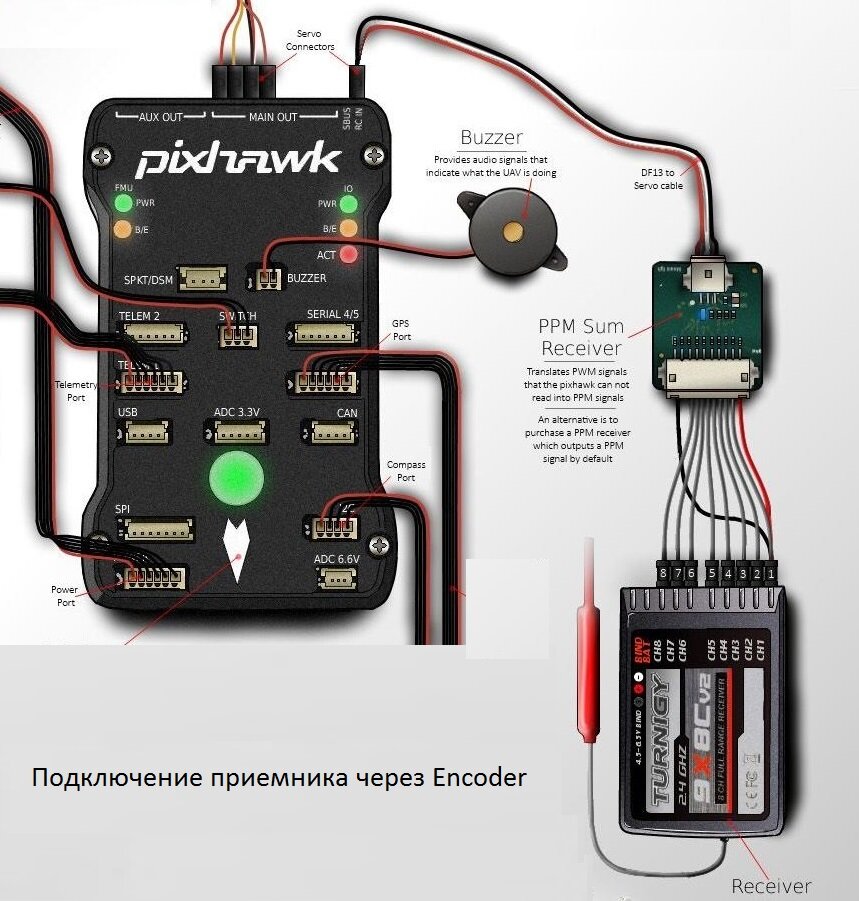
С контроллером Pixhawk организовать удобное переключение шести режимов гораздо сложнее. Все дело в том, что приемники к нему подключаются по протоколу PPM или SBUS, а это значит, что все каналы передаются всего по одному кабелю и разделить их (не подключить 5-ый, а 6-ой воткнуть вместо него) не получится. Тут есть несколько вариантов решений.
Первый вариант - приобрести дополнительный преобразователь (Encoder) сигнала PWM в сигнал PPM. Он в любом случае понадобится, если у вашего приемника нет выходной шины PPM или SBUS. Тогда 5-ый канал приемника мы к преобразователю не подключаем, а 6-ой канал приемника подключаем к 5-ому входу преобразователя.
Второй вариант - если приемник с выходом PPM или SBUS и у него нет шин PWM или категорически не хочется их использовать, покупая дополнительный encoder. Тогда настраиваем на 5-ый канал на крутилку вместо тумблера. В этом случае, вращая крутилку, будет меняться частота импульсов, а с ней меняться режимы. Это не совсем удобно, поскольку нет четкого фиксирования и выставлять нужный режим очень сложно и неудобно. Можно нанести риски, но, в экстренных случаях смотреть на них иногда не бывает времени.
Третий вариант - в продаже есть специальный модуль с 6-ти кнопками, который прикрепляется к пульту и его разъемы подсоединяются вместо крутилки, которая настроена на 5-ый канал. Но, тут надо поработать руками и паяльником. Внешний вид пульта так же изменится.
Четвертый вариант - три основные режима повесить на трехпозиционный переключатель (настроить его на 5-ый канал), а остальные режимы переключать через Mission Planner.
Все известные мне варианты переключения режимов полета я предложил, выбор конкретного за вами.
Помимо 5-го и 6-го канала нам понадобиться 7-ой канал, с помощью которого в дальнейшем мы будем настраивать характеристики самолета непосредственно в полете, включая через него режим AutoTune. Исходя из всей изложенной выше информации нам понадобится приемник и передатчик, поддерживающие 8 каналов.
Теперь перейдем к настройке пульта - миксированию 5-ого и 6-ого каналов. Независимо от конкретной модели передатчика нам необходимо на пятом канале контроллера получить импульсы с частотами 1165, 1295, 1425, 1555, 1685 и 1815. Значения надо смотреть/контролировать в окне калибровки аппаратуры в Mission Planner — 5й канал.
Конкретный способ настройки я покажу на примере своего пульта - Turnigy 9x со штатной прошивкой. Настроить свой пульт можно по аналогии или найти информацию в Интернете. Для переключения режимов я использую трехпозиционный переключатель F.MODE совместно с двухпозиционным THRO HOLD.
1. Очищаем все миксы в аппаратуре, которые могли использовать раньше.
2. Устанавливаем расходы в +-100% и тримеры/субтримеры в ноль для каналов 5 и 6.
3. Переходим к меню AUX-CH и устанавливаем THRO HOLD для CH5.
4. Переключаем F. MODE в позицию 2 и THRO HOLD в положение от себя. Перейдим в меню миксов MIX1, и меняем значение DNRATE на -20. При этом, в Mission Planner у пятого канала значение должно быть 1555. Если оно отличается, то подгоняем параметром DNRATE.
5. Оставляем F. MODE в позиции 2 и переключаем THRO HOLD в положение к себе. Изменяем UPRATE на -12. В Mission Planner у пятого канала значение должно быть 1425. Если оно отличается, то подгоняем параметром UPRATE. Нажимаем кнопку Menu на аппаратуре, чтобы сохранить MIX1.
6. Переключаем F. MODE в позицию N и THRO HOLD в положение от себя. Переходим в меню миксов MIX2, изменяем DNRATE в -50. Проверяем чтобы в Mission Planner у пятого канала стало значение 1685. Если оно отличается, то подгоняем параметром DNRATE.
7. Оставляем F. MODE в позиции N и переключаем THRO HOLD в положение к себе. Изменяем UPRATE на -42. В Mission Planner у пятого канала значение должно быть 1295. Если оно отличается, то подгоняем параметром UPRATE. Нажимаем кнопку Menu на аппаратуре, чтобы сохранить MIX2.
8. Переключаем F. MODE в позицию 1 и THRO HOLD в положение от себя. Переходим в меню миксов MIX3, изменяем DNRATE в -82. Проверяем чтобы в Mission Planner у пятого канала стало значение 1815. Если оно отличается, то подгоняем параметром DNRATE.
9. Оставляем F. MODE в позиции 1 и переключаем THRO HOLD в положение к себе. Изменяем UPRATE на -74. В Mission Planner у пятого канала значение должно быть 1165. Если оно отличается, то подгоняем параметром UPRATE. Нажимаем кнопку Menu на аппаратуре, чтобы сохранить MIX3.
На этом настройку передатчика и приемника можно считать завершенной.
По мере написания материала ниже будут активироваться ссылки на новые статьи, рассматривающие следующие вопросы:
Первые полеты
Что еще можно добавить на борт
Камера
Видеопередатчик
OSD модуль
Видео шлем
Спонсор канала компания Stop-leaks