
Аномальное поведение бортового компьютера поставило в тупик инженеров и чуть прекратило навсегда миссию вертолета на Марсе
На Марсе идет 92 день пребывания нового марсохода Perseverance. Вчера марсианский вертолет должен был совершить свой шестой полет с целью картографирования местности для движения марсохода, а также для проверки технических возможностей вертолета.
Этап проверки оборудования прошел без каких-либо замечаний и даже сторожевой таймер работал в штатном режиме, дав команду на запуск винтов.
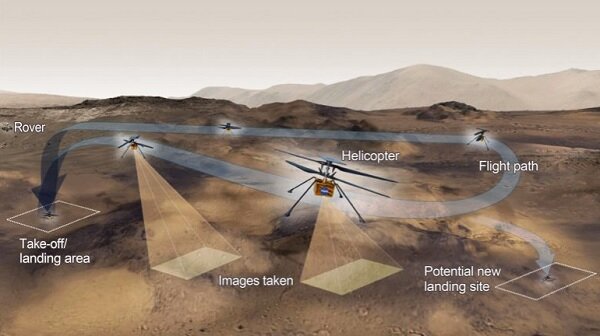
Как и было предусмотрено программой полета, марсианский вертолет Ingenuity поднялся на высоту 10 метров и пролетел в юго-западном направлении 150 метров со скоростью 4 метра в секунду, делая панорамные фотографии местности для будущего путешествия марсохода, далее вертолет должен был пролететь еще 15 метров на юг и приземлиться, но с этого момента начались сбои, заставившие вертолет то разгоняться, то тормозить, то двигаться в противоположную сторону. Бортовые датчики вертолета зафиксировали отклонение по крену и тангажу более чем на 20 градусов, также были зафиксированы значительные скачки энергопотребления.
Руководитель полетов вертолета Боб Баларм вот как описывает механизмы ориентации в пространстве: «Так как вертолёт находится не на Земле, где мы имеем систему GPS навигации необходимо было придумать альтернативную систему навигации в пространстве, достаточно точную и быструю, чтобы она могла управлять вертолетом самостоятельно в онлайн режиме без участия человека.
В результате вертолет получил классическую инерциальную систему (IMU), определяющую фактическое местоположение и самую современную навигационную систему, анализирующую фотографии, полученные с бортовой камеры.
Работает эта система следующим образом: камера делает 30 снимков в секунду поверхности под вертолетом, компьютер распознает фотографии находит на них вертолет и различные камни, возвышенности и другие отличительные особенности местности, далее делает прогноз возможного местоположения вертолета по отношению к особенностям и сравнивает текущее местоположение с прогнозом, сделанным несколько секунд ранее, кроме того анализируется последовательность временных меток и так это происходит постоянно, а в случае несоответствия фактического положения с прогнозом система корректирует положение вертолета».
В этот раз примерно на 54 секунде полета произошел аномальный сбой в анализе фотографий, в результате чего было потеряно несколько снимков, а все остальные снимки приходили с неверными временными метками, в результате сбивался и накапливался не правильный прогноз, и система не верно корректировала местоположение вертолета.
В конечном счете вертолет завис на одном месте и плавно приземлился в 5 метрах от планового места приземления. Победить сбой удалось благодаря системе, которая анализирует не стандартное поведение вертолета и передает права управления инерциальной системе, которая просто приземляет вертолет.
Инженеры разбираются с причинами непонятного сбоя и ищут возможные способы его устранения в будущем
Интересно наши инженеры до подобной системы додумались бы?
Короткое видео, снятое во время критического сбоя
Пожалуйста подпишитесь на мой канал и поставьте 👍 Я буду знать, что вам интересны новости науки и техники со всего света! Не забудьте поделиться публикацией в соц. сетях 📢 Это будет лучшей наградой для меня! Спасибо!