
Как известно, в СССР была очень популярна научная фантастика, одним из атрибутов которой являются антропоморфные (человекоподобные) роботы, превосходящие человека по физическим возможностям и готовые прийти к нему на помощь в трудных ситуациях.
Естественно тема робототехники не могла обойти стороной талантливых и увлеченных школьников. Мы уже рассказывали про робота-кондуктора из Калининграда. Теперь же настал черед более продвинутого андроида.
Родиной “Ориона” (именно так окрестили робота создатели) является кружок космического моделирования г. Сума. Кстати, этот проект занял первое место на 10-м Всесоюзном конкурсе “Космос” в номинации “Популяризация космоса”! Назначение робота – сварщик и исследователь.
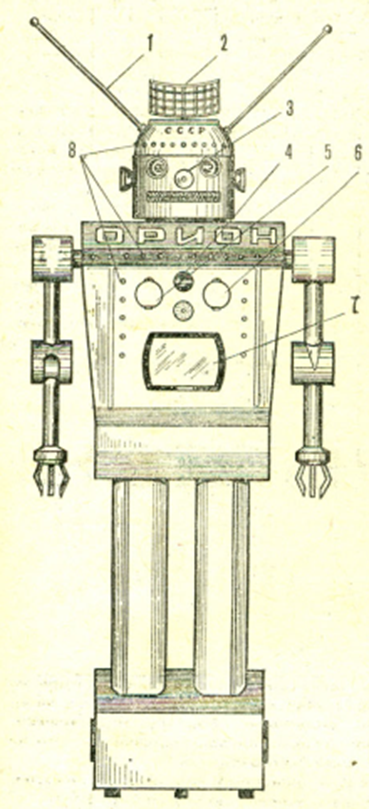
Внешний вид робота показан на рисунке 1:
Структурная схема “Ориона” показана на рисунке 2.
“Орион” управляется с помощью дистанционного пульта, на котором расположен ряд тумблеров, но некоторые операции выполняются автоматически.
Робот может выполнять следующие функции:
- Движение вперед/назад, влево/вправо;
- Поворачивать голову на 180 °;
- Обеспечение дистанционного управления рукой-манипулятором (рука может поворачиваться вокруг своей оси на 270 ° в плечевом суставе и на 90 ° в локтевом, а также сжимать и разжимать пальцы);
- “пробуждаться” при включении света и двигаться в направлении источника света;
- включать звуковую и световую сигнализацию при обнаружении источника радиационного излучения;
- “говорить и отвечать на вопросы” (на самом деле говорит оператор, робот просто снабжен встроенным микрофоном и динамиком);
- Выполнять “сварочные” работы (в руку робота вкладывают термитную спичку с электрозапалом. Температура спички 1500 °С, что позволяет разрезать металлическую пластину толщиной до 3 мм).
Корпус робота был выполнен из стеклоткани и эпоксидного клея ЭПД-5. В нишах “ног”, “туловища”, “головы” и “рук” установлены 9 электродвигателей (рисунок 3).
Вот такой забавный робот получился у ребят, пускай он всего лишь игрушка, но благодаря именно таким играм в СССР вырастали талантливые ученые и инженеры.