Статья носит скорее шуточный характер с попыткой не много ознакомить неофитов в электронике с некоторыми типовыми схемами генераторов прямоугольных импульсов, построенных на ТТЛ и КМОП логике.
Вступление
Копаясь в закромах, я наткнулся на сервопривод, его еще называют рулевой машинкой. Изначально они применялись в моделях на радиоуправлении, но за счет того, что рулевая машинка имеет компактный корпус, то сфера их применения оказалась достаточно широкой.
В частности, я находил в интернетах управление всевозможными защелками, а по прямому назначению ее можно использовать и в робототехнике.
И так нашел значит я эту машинку, при этом я даже не помню, когда и как она была приобретена и вообще для какого проекта. И что же первым делом нужно сделать с ней, правильно проверить. Может ей уже давно пора отправляться на покой.
Разбираемся с принципом работы.
Что же говорят наши интернеты, состоит она из двигателя редуктора, схемы управления и какого-то чувствительного элемента показывающего положение вала редуктора. Как правило это резистор, хотя я так понял кроме подобных сервоприводов еще бывают и промышленные и на валу у них находятся энкодеры.
Из вышеизложенного понятно, что смысл работы такого сервопривода заключается в том, чтоб повернуться на определенный угол и удерживать его. Ну и логично предположить, что существую сервопривода, где в качестве управляющего устройства используются аналоговые схемы и есть привода в которых используются микроконтроллеры. Что делит их на два вида с аналоговым управлением внутри себя и цифровым.
Но все-таки это лирика мне же нужно проверить данный привод. А значит смотрим, что необходимо для этого. И так питается он напряжением в пять вольт, а вот с управлением все хитрее.
Чтоб установить угол нужно на управляющий провод подавать импульсы с частотой 50Гц это для аналоговых, и до 300Гц для цифровых. А вот ширина самого импульса, как раз и определяет положение рычага сервопривода. И для этих рулевых машинок составляет 0,8 мсек и 2,2 мсек хотя я находил данные о том, что длительность импульса для крайнего положения может быть и 2,3 или 2,4. Чтобы двигатель занял среднее положение длительность импульса должна быть 1,5 мсек.
И чем же управлять?
То есть на лицо мы имеем управление с помощью ШИМ. А что у нас умеет в широтно-импульсную модуляцию правильно аналоговый таймер NE555. Но в данной статье я не хочу применять именно его, так как целью является ознакомиться и с другими схемами умеющими генерировать меандр. А за одно и развлечься, а может сделать и полезную штукенцию.
Что ж прочешем инфоделянку и поищем нужные схемы сразу говорю не захотел пользоваться готовыми вариантами, так как у меня есть одна мысль, чего там можно будет дальше из нее сделать ради баловства. И натыкаемся на такие замечательные генераторы, которые сделаны на RC цепях ( что значит резистор и конденсатор, как бы намекая нам, что мы будем заряжать и разряжать конденсатор через резистор в процессе генерирования нашего сигнала) и логических элементах КМОП и ТТЛ.
И самая простая схема, которая встречается в куче устройств на логических элементах в качестве генератора тактовых импульсов, да и вообще генераторов прямоугольных импульсов это:
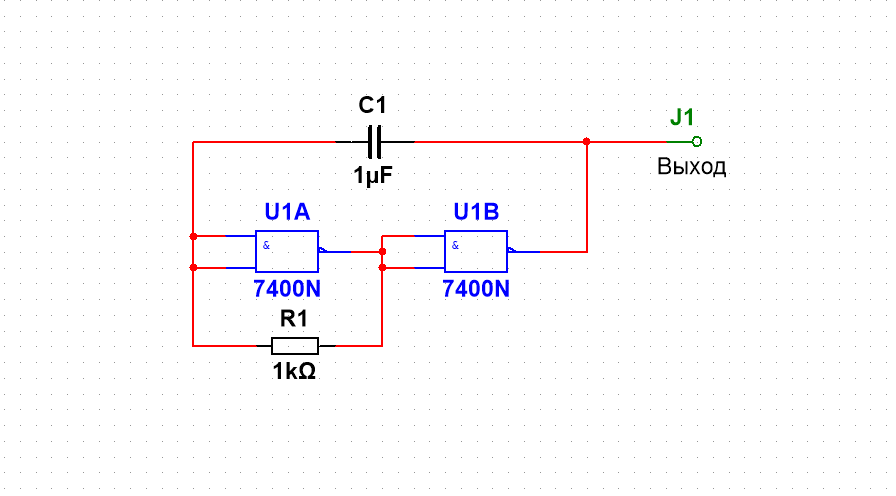
Судя по описанию данной схемы, она хоть и рабочая, но обладает меньшей стабильность, чем следующая схема:
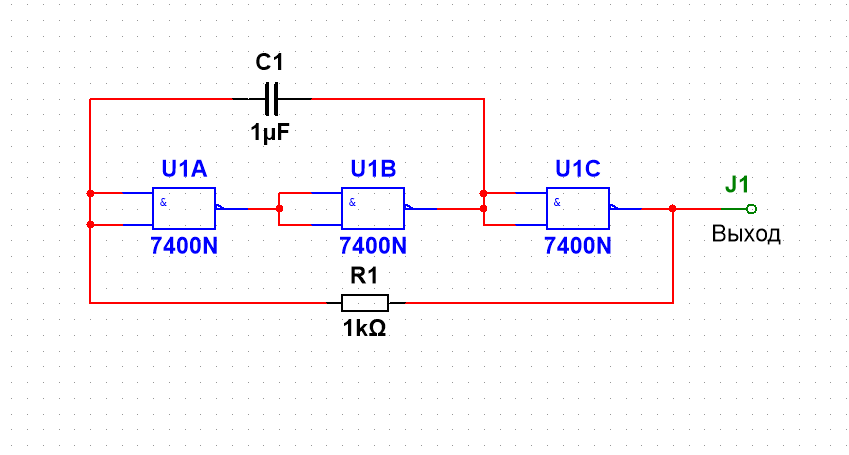
Расчет частоты работы первой схемы F = 0,48/(R1×C1), а частота работы второй схемы F = 0,54/(R1×C1). По сути, микросхема может быть заменена на любую логическую, которая умеет инвертировать входной сигнал.
Ведь принцип работы данного генератора основан на этом. Если посмотреть внимательно на логику работы данного генератора, ноль на входе цепочки логических элементов вызывает заряд конденсатора, через резистор единицей на выходе. Которая заставляет всю цепочку возвращаться обратно к нулю. Забавная схема, но здесь есть одна проблем, которая заключается в том, что данные генераторы дают коэффициент заполнения в 50%. Ну или совсем по-простому, если у нас будет частота работы генератора 20мсек, то 10мсек будет составлять состояние «один» или высокий уровень и 10мсек будет составлять состояние «ноль» или низкий уровень. А нам то надо чтоб единица составляла от 0,8 до 2,2 мсек не порядок. И на помощь нам придет разделение заряда и разряда конденсатора через разные цепи.
Это можно сделать с помощью диодов, разделив резистор R1 на два и заставив зарядный течь через один, а разряд конденсатора выполнять через другой.
То есть заряд конденсатора будет происходить через цепочку R1 D1, что будет определять длительность низкого состояния. А R2 D2 длительность высокого состояния.
Вот я и нашел нужную схему для управления сервоприводом. Расчет для данной схемы, следующий F = 0,77/((R1+R2)×C1)), а скважность импульсов = (R1+R2)/R1.
Так микросхемы типа 7400N или К155ЛА3 у меня нет. Но подобные схемы можно строить на любых элементах И—НЕ, ИЛИ—НЕ и инверторах. А значит микросхема К561ЛН2, которая лежала в тех же закромах, где и сервопривод для данного генератора подойдет. Функциональный аналог, то есть делает тоже самое, но не совпадает по ножкам это CD4049A, а вот то, что совпадает по ножкам, но различается по электрическим характеристикам это CD4069.
Хотя подойдут любые из выше указанных типов микросхем, которые есть под рукой. И отсюда собираем схему для ручного управления сервоприводом. Для этого зададим значение резистора R1=20КОм, отсюда значение резистор R2 для 50% заполнения надо выбрать 20КОм. Конденсатор вычисляем исходя из частоты 50Гц и получаем 385 нФ. Так как это не стандартный номинал, то выбираем ближайший, я выбрал 0,47 мкФ ну или 470 нФ, из-за этого частота будет ниже. Но я так понял, что сервоприводы спокойно воспринимают частоты ниже 50Гц. Поэтому я выбрал емкость больше, хотя можно попробовать и 0,33мкФ, что повысит частоту.
И итоговая схема будет выглядеть следующим образом:
Переменный резистор в 10КОм выбран, потому что нам не нужно коэффициент заполнение в 50%, а вот меньше, как никогда лучше подойдет (хотя у меня просто не было другого).
Следующей проблемой будет, то, что в крайних положениях движка резистора коэффициент заполнения будет уходить за пределы рабочих диапазонов для сервопривода. Поэтому не мешало бы ограничить. И поэтому добавляем 1,5КОм для того, что ширина импульса не уходило за 0,8 мсек и параллельно резистору R3 добавить резистор 2,4-2,5КОм для того, чтоб ширина импульса не уходила больше, чем за 2,2-2,4 мсек.
И так итоговая схема показана выше я думаю следующей части соберем на ней, какую-нибудь веселую штучку.
Для проверки работы схемы, я собрал на макетной плате тестовый вариант, который показан ниже. Собрана была за час с поиском нужных деталей и перерывами, на рассуждения. Поэтому я думаю подобные схемы полезны будут для сборки новичкам.
Далее будет видео, что данная плата работает, а так же добавлены дополнительные резисторы, чтобы проверить, что данная схема работает от одного крайнего положения до другого.
И так спасибо за внимание, Далее будет поделка на этой схеме, так больше для развлечения.