
Луноход 1
Через год после того, как Нил Армстронг сделал первые шаги на Луне, СССР послал первый успешный роботизированный комплекс - Луноход-1. С ноября 1970 года до лета следующего года Луноход-1 прошел более 10 км по лунной поверхности. Управлялся удаленно из Советского Союза. Чтобы представить это достижение в перспективе, марсоход НАСА Opportunity проехал всего 12 км за шесть лет. Луноход-1 работал на солнечной энергии днем и на полониевом тепловом обогревателе ночью, чтобы выдержать температуру -150 ° C. Он отправил данные о лунном грунте и некоторые из первых снимков лунных кратеров крупным планом.
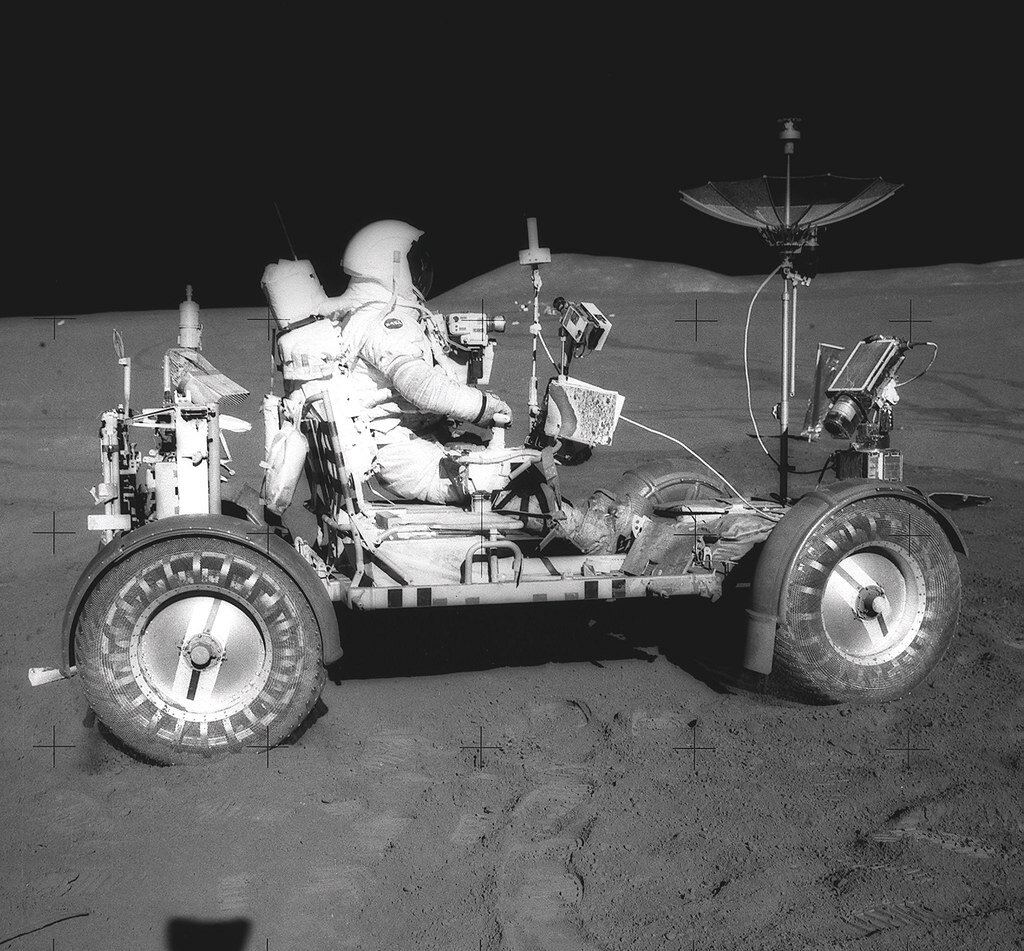
Лунный багги Apollo 15
Первый луноход НАСА, или лунный багги, был доставлен на поверхность Луны, когда Луноход-1 завершил свои передачи в июле 1971 года. Запущенный в рамках пилотируемой миссии Аполлон-15, лунный багги Аполлон-15 стал первым транспортным средством, отправившимся на Луну. Прелесть управляемого лунохода заключалась в том, что он помог астронавтам исследовать территорию Луны за пределами места посадки, а это значит, что они собирали гораздо более значимые и интересные образцы. И во время миссии этот LRV проехал в общей сложности 27 км - или три часа две минуты. Технологически он лег в основу каждого марсохода, который был построен и запущен с тех пор.
Sojourner
Соджорнер был первым роботом-вездеходом, который приземлился на поверхности Марса. Названный в честь афроамериканского активиста Соджорнер Трут, марсоход исследовал район Красной планеты в районе места посадки под названием Арес Валлис. Эта местность была плоской, что позволяло марсоходу безопасно приземлиться, считалось, что это место древней равнины. С момента его приземления 4 июля 1997 года до его последней передачи (двумя месяцами позже) "Соджорнер" отправил 550 изображений Марса, а также предоставил захватывающие сведения о типе почвы, ветрах и погоде.
Opportunity Rover
Время работы-ошеломляющие 15 лет ( в 55 раз превысив запланированный срок), марсоход Opportunity совершил последнюю передачу в штаб-квартиру НАСА 10 июня 2018 года. Opportunity приземлился в районе Меридиани Планум на Марсе в январе 2004 года, через 20 дней после приземления его близнеца марсохода Spirit в кратере Гусева на другом конце планеты. Spirit прошел почти 8 км до завершения своей миссии в мае 2011 года, в то время как Opportunity преодолел рекордные 45 км. За время своих путешествий он собрал более 217 000 изображений.
Curiosity Rover
Вероятно, самый известный из марсоходов, который до сих пор находится на боевом дежурстве. На этом селфи изображен марсоход размером с автомобиль на хребте Веры Рубин в кратере Гейла на Марсе. "Кьюриосити" приземлился на Марс 6 августа 2012 года и первоначально был введен в эксплуатацию на два года. Всего через шесть месяцев после приземления НАСА продлило эту миссию «на неопределенный срок». Он был построен для оценки «обитаемости» Марса и оснащен самым большим и передовым набором научных инструментов, когда-либо отправлявшихся на Марс. Эти инструменты могут отбирать образцы горных пород, анализировать их и отправлять данные обратно на Землю.
Dextre
Чуть ближе к Земле находится Dextre - двурукий космический робот-телеманипулятор, созданный Канадским космическим агентством (CSA), для помощи на Международной космической станции (МКС). Свою первую плановую задачу он выполнил в феврале 2011 года и помогал космонавтам на борту в обслуживании станции. Dextre выполняет тяжелые рутинные работы, которые необходимо выполнять как внутри, так и за пределами станции, и на этой фотографии, на внешней стороне МКС, он меняет одну из внешних камер. Управляется с Земли CSA, что позволяет астронавтам на борту проводить больше времени с исследованиями. Каждая его рука имеет семь суставов, которые могут двигаться вверх и вниз, из стороны в сторону и вращаться. В каждой руке находится гаечный ключ, камера, фонари и разъем для подключения питания, данных и видео.