Продолжаю публикацию статей по проекту создания системы управления электронным якорем. Напомню, что речь идет об устройстве, задачей которого является удержание позиции лодки на одном месте за счет использования электромотора и системы GPS навигации.
Ранее я писал статью, где рассказывал о подготовке тестовой платформы для испытаний и отладки системы управления.
Итак, платформа выбрана, где в качестве электромотора используется небольшой мотор-редуктор N20 на 35 об/мин, 6В. Приводом для управления углом направления движением послужил сервопривод MG90S - часто используемый в робототехнике для поделок. Его задача поворачивать мотор-редуктор с прикрепленным к нему колесом на 180 градусов (+90 0 -90).

Управление мотором и сервоприводом от контроллера Arduino. Для разработки этого достаточно, что бы подобрать алгоритмы движения.
В качестве датчиков используются:
- электромагнитный компас 5883
- GPS навигатор GPS6MV2
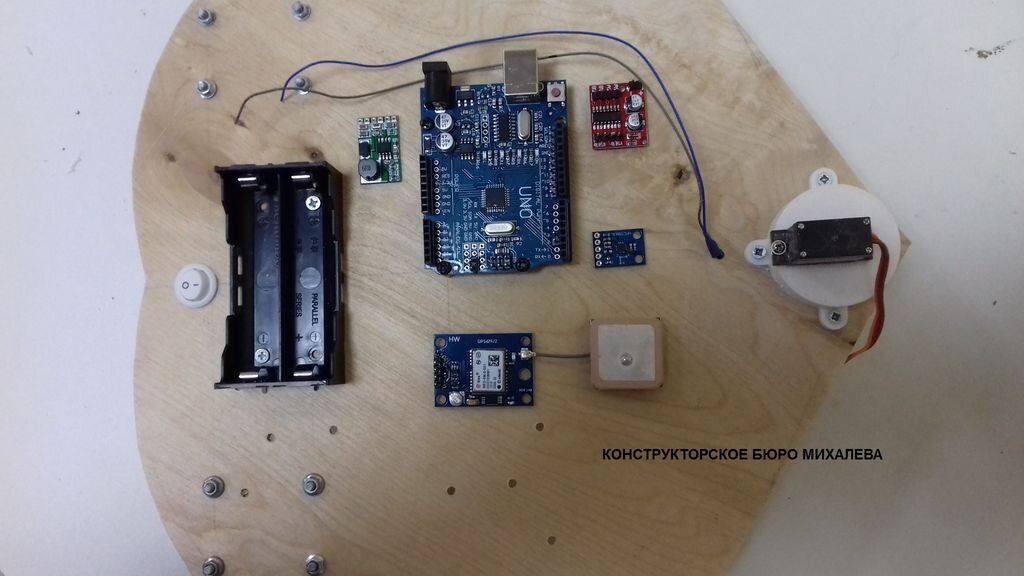
Электроника устройства для управления электронным якорем DC-DC для питания сервы и мотора-редуктора.
Компас подключается по I2C шине, GPS-модуль по UART.
В целом все достаточно просто. Для сервопривода был изготовлен кронштейн на 3d-принтере, поскольку я не смог найти подходящих из готовых решений. Подшипники изначально поставил и даже тест показал работоспособность такой конструкции, но в последующем отказался от этой опции и скольжение осуществляется по пластику.
Питание устройства - от пары аккумуляторов 18650, что обеспечивает питание 7-8 вольт.
Фото было сделано до коммутации, что бы было хорошо видно применяемые модули.
О том, как было сделано подключение модулей и какие дополнительные платы изготовлены для коммутации и управления системой читайте в следующих статьях.
Что бы не пропустить новые статьи подписывайтесь на мой канал.
Пишите комментарии, делитесь вашими мыслями об этом устройстве и ваших вариантах его разработки и применения.
С уважением к читателям канала,
Михалев СИ, руководитель конструкторского бюро и лабораторий детской робототехники