Управление памятью – одна из главных задач ОС. Она критична как для программирования, так и для системного администрирования. Я постараюсь объяснить, как ОС работает с памятью. Концепции будут общего характера, а примеры я возьму из Linux и Windows на 32-bit x86. Сначала я опишу, как программы располагаются в памяти.
Каждый процесс в многозадачной ОС работает в своей «песочнице» в памяти. Это виртуальное адресное пространство, которое в 32-битном режиме представляет собою 4Гб блок адресов. Эти виртуальные адреса ставятся в соответствие (mapping) физической памяти таблицами страниц, которые поддерживает ядро ОС. У каждого процесса есть свой набор таблиц. Но если мы начинаем использовать виртуальную адресацию, приходится использовать её для всех программ, работающих на компьютере – включая и само ядро. Поэтому часть пространства виртуальных адресов необходимо резервировать под ядро.
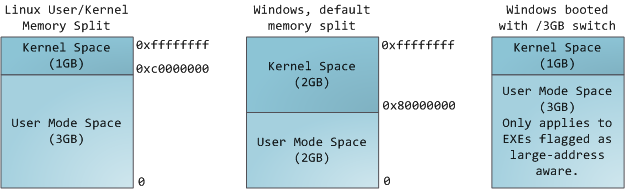
Это не значит, что ядро использует так много физической памяти – просто у него в распоряжении находится часть адресного пространства, которое можно поставить в соответствие необходимому количеству физической памяти. Пространство памяти для ядра отмечено в таблицах страниц как эксклюзивно используемое привилегированным кодом, поэтому если какая-то программа пытается получить в него доступ, случается page fault. В Linux пространство памяти для ядра присутствует постоянно, и ставит в соответствие одну и ту же часть физической памяти у всех процессов. Код ядра и данные всегда имеют адреса, и готовы обрабатывать прерывания и системные вызовы в любой момент. Для пользовательских программ, напротив, соответствие виртуальных адресов реальной памяти меняется, когда происходит переключение процессов:

Голубым отмечены виртуальные адреса, соответствующие физической памяти. Белым – пространство, которому не назначены адреса. В нашем примере Firefox использует гораздо больше места в виртуальной памяти из-за своей легендарной прожорливости. Полоски в адресном пространстве соответствуют сегментам памяти таким, как куча, стек и проч. Эти сегменты – всего лишь интервалы адресов памяти, и не имеют ничего общего с сегментами от Intel. Вот стандартная схема сегментов у процесса под Linux:
Когда программирование было белым и пушистым, начальные виртуальные адреса сегментов были одинаковыми для всех процессов. Это позволяло легко удалённо эксплуатировать уязвимости в безопасности. Зловредной программе часто необходимо обращаться к памяти по абсолютным адресам – адресу стека, адресу библиотечной функции, и т.п. Удаленные атаки приходилось делать вслепую, рассчитывая на то, что все адресные пространства остаются на постоянных адресах. В связи с этим получила популярность система выбора случайных адресов. Linux делает случайными стек, сегмент отображения в память и кучу, добавляя смещения к их начальным адресам. К сожалению, в 32-битном адресном пространстве особо не развернёшься, и для назначения случайных адресов остаётся мало места, что делает эту систему не слишком эффективной.
Самый верхний сегмент в адресном пространстве процесса – это стек, в большинстве языков хранящий локальные переменные и аргументы функций. Вызов метода или функции добавляет новый кадр стека (stack frame) к существующему стеку. После возврата из функции кадр уничтожается. Эта простая схема приводит к тому, что для отслеживания содержимого стека не требуется никакой сложной структуры – достаточно всего лишь указателя на начало стека. Добавление и удаление данных становится простым и однозначным процессом. Постоянное повторное использование районов памяти для стека приводит к кэшированию этих частей в CPU, что добавляет скорости. Каждый поток выполнения (thread) в процессе получает свой собственный стек.
Можно прийти к такой ситуации, в которой память, отведённая под стек, заканчивается. Это приводит к ошибке page fault, которая в Linux обрабатывается функцией expand_stack(), которая, в свою очередь, вызывает acct_stack_growth(), чтобы проверить, можно ли ещё нарастить стек. Если его размер не превышает RLIMIT_STACK (обычно это 8 Мб), то стек увеличивается и программа продолжает исполнение, как ни в чём не бывало. Но если максимальный размер стека достигнут, мы получаем переполнение стека (stack overflow) и программе приходит ошибка Segmentation Fault (ошибка сегментации). При этом стек умеет только увеличиваться – подобно государственному бюджету, он не уменьшается обратно.
Динамический рост стека – единственная ситуация, в которой может осуществляться доступ к свободной памяти, которая показана белым на схеме. Все другие попытки доступа к этой памяти вызывают ошибку page fault, приводящую к Segmentation Fault. А некоторые занятые области памяти служат только для чтения, поэтому попытки записи в эти области также приводят к Segmentation Fault.
После стека идёт сегмент отображения в память. Тут ядро размещает содержимое файлов напрямую в памяти. Любое приложение может запросить сделать это через системный вызов mmap() в Linux или CreateFileMapping() / MapViewOfFile() в Windows. Это удобный и быстрый способ организации операций ввода и вывода в файлы, поэтому он используется для подгрузки динамических библиотек. Также возможно создать анонимное место в памяти, не связанное с файлами, которое будет использоваться для данных программы. Если вы сделаете в Linux запрос на большой объём памяти через malloc(), библиотека C создаст такую анонимное отображение вместо использования памяти из кучи. Под «большим» подразумевается объём больший, чем MMAP_THRESHOLD (128 kB по умолчанию, он настраивается через mallopt().)
Сама куча расположена на следующих позициях в памяти. Она обеспечивает выделение памяти во время выполнения программы, как и стек – но, в отличие от него, хранит те данные, которые должны пережить функцию, размещающую их. В большинстве языков есть инструменты для управления кучей. В этом случае удовлетворение запроса на размещение памяти выполняется совместно программой и ядром. В С интерфейсом для работы с кучей служит malloc() с друзьями, а в языке, имеющем автоматическую сборку мусора, типа С#, интерфейсом служит ключевое слово new.
Если в куче оказывается недостаточно места для выполнения запроса, эту проблему может обработать сама программа без вмешательства ядра. В ином случае куча увеличивается системным вызовом brk(). Управление кучей – дело сложное, оно требует хитроумных алгоритмов, которые стремятся работать быстро и эффективно, чтобы угодить хаотичному методу размещению данных, которым пользуется программа. Время на обработку запроса к куче может варьироваться в широких пределах. В системах реального времени есть специальные инструменты для работы с ней. Кучи тоже бывают фрагментированными:
И вот мы добрались до самой нижней части схемы – BSS, данные и текст программы. BSS и данные хранят статичные (глобальные) переменные в С. Разница в том, что BSS хранит содержимое непроинициализированных статичных переменных, чьи значения не были заданы программистом. Кроме этого, область BSS анонимна, она не соответствует никакому файлу. Если вы пишете static int cntActiveUsers , то содержимое cntActiveUsers живёт в BSS.
Сегмент данных, наоборот, содержит те переменные, которые были проинициализированы в коде. Эта часть памяти соответствует бинарному образу программы, содержащему начальные статические значения, заданные в коде. Если вы пишете static int cntWorkerBees = 10 , то содержимое cntWorkerBees живёт в сегменте данных, и начинает свою жизнь как 10. Но, хотя сегмент данных соответствует файлу программы, это приватное отображение в память (private memory mapping) – а это значит, что обновления памяти не отражаются в соответствующем файле. Иначе изменения значения переменных отражались бы в файле, хранящемся на диске.
Пример данных на диаграмме будет немного сложнее, поскольку он использует указатель. В этом случае содержимое указателя, 4-байтный адрес памяти, живёт в сегменте данных. А строка, на которую он показывает, живёт в сегменте текста, который предназначен только для чтения. Там хранится весь код и разные другие детали, включая строковые литералы. Также он хранит ваш бинарник в памяти. Попытки записи в этот сегмент оканчиваются ошибкой Segmentation Fault. Это предотвращает ошибки, связанные с указателями (хотя не так эффективно, как если бы вы вообще не использовали язык С). На диаграмме показаны эти сегменты и примеры переменных:
Изучить области памяти Linux-процесса можно, прочитав файл /proc/pid_of_process/maps. Учтите, что один сегмент может содержать много областей. К примеру, у каждого файла, сдублированного в память, есть своя область в сегменте mmap, а у динамических библиотек – дополнительные области, напоминающие BSS и данные. Кстати, иногда, когда люди говорят «сегмент данных», они имеют в виду данные + bss + кучу.
Бинарные образы можно изучать при помощи команд nm и objdump – вы увидите символы, их адреса, сегменты, и т.п. Схема виртуальных адресов, описанная в этой статье – это т.н. «гибкая» схема, которая по умолчанию используется уже несколько лет. Она подразумевает, что переменной RLIMIT_STACK присвоено какое-то значение. В противном случае Linux использует «классическую» схему:
Оригинал статьи на Хабре (2015 год)
К лучшим публикациям Хабра за сутки