В предыдущей статье мы утверждали, что при прочих равных условиях ПИД-регулятор дает лучшие результаты по точности поддержания параметров системы на заданном уровне, чем позиционный регулятор.
Однако, следует сделать важную оговорку: при условии, что ПИД-регулятор хорошо настроен.

Но и это не является окончательным утверждением. Дело в том, что фраза «хорошо настроен» требует уточнения: что значит «хорошо настроен»? Каковы критерии? А критерии, в свою очередь, сильно зависят от поставленной задачи.
Поясним это на двух примерах.
Пример 1.
Поведение регулятора в замкнутом контуре управления во многом описывается переходной характеристикой: зависимостью регулируемого параметра от времени при скачкообразном изменении уставки.
Переходная характеристика получается, в частности, при включении регулятора: регулятор переходит с установившего значения в выключенном состоянии на заданную уставку.
Предположим, что в первой задаче требуется обеспечить максимально точное поддержание температуры на уровне уставки с минимальными отклонениями, не должно быть перегрева в процессе выхода на уставку, при этом, известно, что возмущающие воздействия на систему невелики и медленные.
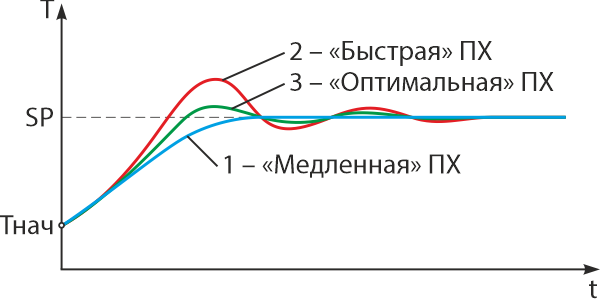
Для такой задачи наилучшей будет переходная характеристика с затянутым выходом на уставку, без выброса и без колебаний (см. рис.1, кривая 1 – «Медленная» ПХ).
Пример 2.
Во втором примере присутствуют сильные и быстрые возмущающие воздействия и возможно маневрирование уставкой.
Поскольку из-за воздействия этих двух динамических факторов вряд ли стоит ожидать высокой статической точности поддержания параметра на уровне уставки, для решения этой задачи подойдет лучше переходная характеристика, обеспечивающая наибольшее быстродействие и динамическую точность, возможно, даже в ущерб точности в статическом режиме (см. рис.1, кривая 2 – «Быстрая» ПХ).
Таким образом, для двух приведенных примеров наилучшим образом подходят разные переходные характеристики, а значит, потребуются разные наборы настроечных параметров ПИД-регулятора: зоны пропорциональности, времени интегрирования, времени дифференцирования.
Как видим из сказанного, можно получить в каком-то смысле «разные» регуляторы и соответствующие разные поведения системы путем разной настройки параметров ПИД-регулятора.
Напомним, что таким свойством (настройкой параметров с целью повышения качества регулирования) позиционный регулятор вообще не обладает.
Переходная характеристика позиционного регулятора зависит от конструктивных особенностей объекта, инерционности объекта, инерционных характеристик датчика и исполнительного устройства, их взаимного расположения и от других независящих от регулятора факторов.
Единственный настроечный параметр у позиционного регулятора - зона гистерезиса. Подробнее, читайте нашу статью про позиционный регулятор.
При этом гистерезис, обычно, вводят как меру борьбы с частыми включениями-выключениями исполнительного устройства (для уменьшения износа), в частности, из-за эффекта дребезга контактов. Конечно, введение зоны гистерезиса ухудшает точность регулирования позиционным регулятором.
Итак, ПИД регулятор требует настройки своих параметров. Это можно сделать вручную подбором или расчетным путем с контролем за переходными характеристиками, либо с помощью функции автонастройки, которая как правило, имеется в современных микропроцессорных ПИД контроллерах.
Режим автоматической настройки параметров реализован и во всех ПИД-регуляторах НПФ КонтрАвт.
Она уменьшает время пуска-наладки и позволяет получить высокое качество регулирования даже пользователям-неспециалистам.
Очевидно, что реализованный алгоритм автоматической настройки адаптирован и оптимизирован для таких объектов, которые максимально хорошо поддаются управлению с помощью ПИД алгоритма.
Он позволяет получить наиболее оптимальную переходную характеристику для максимально большого числа типичных объектов в промышленности.
Она показана на рис. 1 (кривая 3 «Оптимальная» ПХ) и имеет небольшой выброс на стадии выхода на уставку, быстрозатухающие колебания с последующим быстрым выходом на уставку.
Такая переходная характеристика (и такая настройка параметров ПИД регулятора) обеспечивает компромисс между динамической и статической погрешностями управления и для большинства объектов, используемых в промышленности, дает хорошее качество регулирования.
Следует оговориться, что при работе с объектами, параметры которых лежат на краях области применимости ПИД алгоритма, результат настройки может быть не самым лучшим. Однако, специалисты могут повысить качество регулирования путем ручной подстройки ПИД параметров. Как это можно сделать, ориентируясь на вид переходных характеристик, будет рассказано в следующей статье.
Автонастройка
После включения функции автонастройки регулятор работает в двухпозиционном режиме (бежевый участок), выходит на уставку (возможен выход как сверху (Тнач > SP), так и снизу (Тнач < SP) от уставки) и совершает один цикл колебаний.
По параметрам этого колебания контроллер рассчитывает параметры ПИД алгоритма, а затем автоматически переходит в режим ПИД регулирования (желтый участок).
Длительность автонастройки – один период колебаний в системе (зеленый участок).
Характерный вид процесса на всех трех этапах (выход на заданный уровень, автоматическая настройка и автоматическое регулирование ) показан на рис. 2.
Таким образом, в режиме автонастройки регулятор сначала работает в двухпозиционном режиме, а затем в режиме ПИД-регулирования.
Поскольку после окончания автонастройки регулятор находится уже в точке уставки SP, то переходный процесс заключается только в быстрозатухающих колебаниях относительно уставки.
Очевидно, в течение этих двух этапов общих результат будет не хуже, чем при позиционном регулировании. Это значит, в частности, что режим автонастройки можно запускать каждый раз при включении регулятора и заново настраивать ПИД параметры, если точность позиционного регулирования на первом шаге является допустимой.
Найденные таким образом параметры сохраняются в энергонезависимой памяти, поэтому при работе с одной и той же системой настройка производится только один раз. При необходимости параметры могут быть скорректированы вручную оператором.
Есть ряд требований и рекомендаций, которые следует выполнять для получения положительный результатов автонастройки:
- Стартовое значение технологического параметра в момент запуска режима автонастройки должно максимально отличаться от значения уставки.
- Все параметры системы в процессе автонастройки должны быть такими же, как и потом в рабочем режиме. Например, это означает , что автонастройку следует проводить не на пустой печи, а на загруженной.
- В момент проведения автонастройки не должны изменяться параметры системы (например, нельзя открывать дверь печи, производить загрузку-выгрузку изделий, временно отключать ТЭНы, переставлять датчик температуры в другое место и т.п.). Это приведет к некорректной настройке параметров.
- Бывают объекты, у которых оптимальные ПИД параметры зависят от уровня уставки. Поэтому для каждого уровня уставки (при значительном различии уровней) рекомендуется проводить свою настройку параметров, либо убедиться на практике, что изменение уставки не влияет на параметры настройки.
- Изменение параметров системы ( например, степени загрузки печи, изменение мощности исполнительных устройств, изменение расположения датчика и т.п.) требует проведения новой автонастройки.
- Если колебательный процесс в ходе автонастройки не является принципиальным и укладывается в допустимые требования, то процесс автонастройки можно запускать каждый раз заново при каждом пуске системы.
В некоторых регуляторах НПФ «КонтрАвт» (например, МЕТАКОН-6305) допускается проводить автонастройку не на уровне уставки SP, а на некотором другом уровне со смещением SP-Δ. Затем после автонастройки регулятор автоматически переходит на уставку SP (см.рис.3). Такой вариант автонастройки может понадобиться, если в системе не допускаются выбросы в процессе автонастройки.
В следующей статье мы рассмотрим подробнее, как вид переходных характеристик связан со значениями параметров ПИД алгоритма, и покажем, как проводить их ручную настройку (корректировку).
НПФ «КонтрАвт», г. Нижний Новгород,
Тел.: (831) 260-13-08
e-mail: sales@contravt.ru