
Интеграция имитатора ГНСС R&S®SMBV100B с набором инструментальных средств AVL DRIVINGCUBE™ открывает новые возможности для проверки передовых систем помощи водителю и функций автономного вождения на уровне транспортного средства. Установив полностью укомплектованный автомобиль на испытательный стенд со средствами имитации воздействия на физические датчики, инженеры получают возможность проводить быстрые, воспроизводимые и экономичные испытания. Такое решение также позволяет воспроизвести все возможные сценарии вождения в реалистичных и безопасных условиях.
Измерительная задача
Самоуправляемые автомобили становятся все более и более акту-
альным трендом современной автомобильной промышленности. При
переходе от уже доступных систем помощи водителю (ADAS) уровня 2
к частично автономному вождению (AD) и полностью автономному во-
ждению в будущем сложность функций управления резко возрастает.
Проверка работы этих функций во всех возможных условиях и вариа-
циях — серьезный вызов для индустрии автомобилестроения.
Такие функции, как автономное экстренное торможение (AEB) и
адаптивный круиз-контроль (ACC) или даже функции полной автома-
тизации, такие как автопилот для автомагистралей, требуют огромного
количества функциональных и нефункциональных проверок и оптими-
зации в составе интегрированного транспортного средства во множе-
стве эксплуатационных ситуаций и конфигураций.
Сложность сценариев испытаний и огромный пробег, необходимый
для обеспечения безопасной работы этих функций — сложные зада-
чи, требующие современного подхода к проведению проверок.
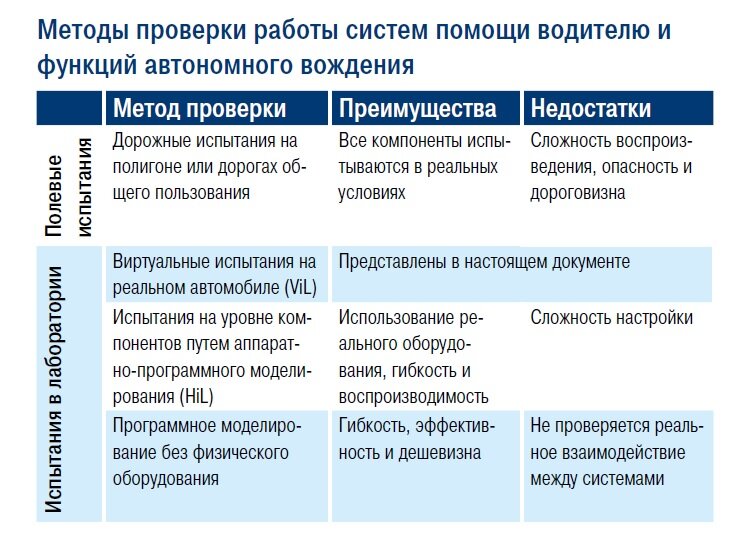
В настоящее время существуют три основных метода проверки ADAS
и AD. Как правило, такие испытания проводятся на дорогах обще-
го пользования или испытательном полигоне, с помощью аппарат-
но-программного моделирования (Hardware-in-the-Loop, HiL) или
путем чисто виртуальных, основанных на программном обеспечении
имитационных испытаний без использования каких-либо аппаратных
компонентов.
Испытания на полигоне или дорогах общего пользования реали-
стичны, но не обеспечивают требуемой воспроизводимости и могут
представлять опасность для водителя-испытателя и других участников
испытаний.
Кроме того, приведение сценариев в исходное состояние
перед каждым испытательным заездом на полигоне занимает много
времени. В испытаниях на основе аппаратно-программного модели-
рования (HiL) используют реальные электронные блоки управления
(ЭБУ) и компоненты, но этот подход отличается сложностью настрой-
ки, поскольку требуется комплексное моделирование остальной части
шины управления. Чистое моделирование — очень продуктивный,
эффективный и гибкий подход. Однако из-за отсутствия физических
компонентов виртуальным испытаниям не хватает реального вза-
имодействия между системами автомобиля, что очень важно для
проверки.
Многие недостатки, связанные с каждым методом, могут быть устра-
нены при проведении испытаний на реальном автомобиле (Vehicle-inthe-
Loop, ViL), которые более подробно описаны далее.
Решение от компаний Rohde & Schwarz и AVL
Платформа AVL DRIVINGCUBE™ предлагает другой подход к провер-
ке работы систем, устраняя разрыв между испытаниями в реальных
дорожных условиях и моделированием. В отличие от аппаратно-про-
граммного моделирования (HiL), основанного на использовании от-
дельных компонентов, этот метод предусматривает проведение ис-
пытаний полностью укомплектованного и готового к эксплуатации
автомобиля в виртуальной среде на испытательном стенде. Для вос-
произведения влияния окружающей среды на испытываемые блоки
управления используются физические или поведенческие модели датчиков (то есть подача выходных сигналов датчиков, полученных с
помощью программного моделирования, в ЭБУ) либо имитаторы воз-
действий на физические датчики. Эта испытательная среда предна-
значена для оценки всех функций систем помощи водителю (ADAS) и
автономного вождения (AD), например автоматического разгона или
торможения автомобиля при работе в режиме адаптивного круиз-кон-
троля (ACC) с прогнозированием.
AVL DRIVINGCUBE™ обеспечивает повышение эффективности при
проверке работы и оптимизации функций ADAS и AD, поскольку сце-
нарии на испытательном стенде воспроизвести гораздо легче, чем в
реальных дорожных условиях. Этот подход также упрощает доступ к
автомобилю во время проведения испытаний. Критические ситуации
можно проверить безопасным способом, что невозможно на реаль-
ной дороге. В частности, средства моделирования датчиков и имита-
ции воздействий на них играют важную роль для получения надежных
результатов при использовании сложных сценариев.
Создание сигнальной обстановки для приемников
ГНСС с помощью R&S®SMBV100B Универсальный имитатор ГНСС R&S®SMBV100B помогает повысить
реалистичность испытательной среды за счет имитации воздействия
реальных радиосигналов ГНСС на встроенную в автомобиль систе-
му ГНСС. Это дает возможность проводить испытания функций ADAS
и AD, основанных на использовании навигации и карт, таких как
адаптивный круиз-контроль (ACC) с прогнозированием или автоном-
ное движение между транспортными центрами (Hub-to-Hub, H2H).
Имитатор R&S®SMBV100B может генерировать сигналы всех гло-
бальных навигационных спутниковых систем, таких как GPS, Galileo, ГЛОНАСС и BeiDou, а также многих спутниковых систем дифферен-
циальных поправок (SBAS). Благодаря поддержке 60 каналов можно
легко настроить реалистичные созвездия с присутствием спутников
разных ГНСС.
Кроме того, можно одновременно генерировать сигналы во всех
частотных диапазонах (например, L1, L2 и L5), что дает возможность
проверять работу современных многочастотных приемников ГНСС.
Видимость спутников и уровень мощности можно регулировать в про-
цессе работы, получая дополнительные возможности для моделиро-
вания зон затрудненного приема или блокировки сигналов ГНСС.
Имитатор ГНСС R&S®SMBV100B принимает удаленные коман-
ды от испытательного стенда по LAN, через порты USB или GPIB.
Данные о положении и направлении движения, необходимые для
моделирования ГНСС, могут передаваться в имитатор с помощью
команд SCPI или UDP, что обеспечивает легкость интеграции с
AVL DRIVINGCUBE™.
Высокая скорость потоковой передачи (до 100 Гц) в сочетании с ма-
лой задержкой обработки команд (до 20 мс) обеспечивает высокую
точность воспроизведения и обработки сигналов.
Проверка работы функции адаптивного круизконтроля с прогнозированием в среде ViL
Платформа AVL DRIVINGCUBE™ помогает упростить разработку си-
стем ADAS, например, проверку работы экономящей топливо системы
адаптивного круиз-контроля (ACC) с прогнозированием.
Система ACC с прогнозированием учитывает топологию дороги на
основе географической карты высот и фактическое положение транс-
портного средства, вычисленное приемником ГНСС. Используя эти
данные, система регулирует скорость автомобиля и алгоритм управления двигателем для оптимизации энергопотребления на протяжении всего маршрута.
Чтобы проверить работу системы ACC с прогнозированием,
Rohde & Schwarz и AVL установили описанный выше набор инстру-
ментов на динамометрический стенд для грузовых автомобилей в
Стокгольме.
Для моделирования трассы движения виртуального грузовика исполь-
зуется географическая карта, реализованная в виртуальной среде
AVL DRIVINGCUBE™. Данные о движении физического транспортного
средства, управляемого системой ACC с прогнозированием (4), реги-
стрируются динамометрическим стендом (5) и передаются в контрол-
лер системы (1).
Контроллер рассчитывает ожидаемое сопротивление движению на
основе модели, движущейся по виртуальной трассе. Затем ожида-
емое сопротивление движению воспроизводится для физического
транспортного средства на динамометрическом стенде путем уста-
новки сопротивления динамометров.
На основе информации о движении физического транспортного сред-
ства обновляется положение виртуального на трассе. Полученные
данные о положении отправляются в имитатор R&S®SMBV100B (2),
который генерирует соответствующий сигнал ГНСС. Этот сигнал ГНСС
поступает в приемник ГНСС физического транспортного средства (3),
где вычисляется местоположение, которое используется системой
ACC для надлежащей корректировки алгоритма управления.
Используя этот набор инструментов и физическое транспортное
средство на испытательном стенде в Швеции, можно было управлять
виртуальным грузовиком, движущимся по дороге в Германии. Для
воспроизведения радиосигналов GPS использовался имитатор ГНСС
R&S®SMBV100B.
Ключевые преимущества
► Все дорожные испытания можно провести на уровне
транспортного средства в лабораторных условиях с высокой
воспроизводимостью
► Условия проведения испытаний, особенно для критических
маневров, полностью безопасны
► Имитация работы ГНСС с высокой частотой обновления, малыми
задержками и превосходной точностью сигнала и обработки
► Имитация любого положения на земном шаре с использованием
различных спутниковых группировок
► Поддержка ГНСС GPS, Galileo, ГЛОНАСС и BeiDou во всех
частотных диапазонах
► Имитация зон затрудненного приема и эффектов многолучевого
распространения сигнала
Данная схема имеет множество преимуществ по сравнению с тра-
диционными методами проверки работы и испытаний ADAS/AD. Все
компоненты испытываются на уровне транспортного средства, как и
при испытаниях на полигоне. Но при этом данный метод сохраняет
гибкость и воспроизводимость, характерные для испытаний с помо-
щью аппаратно-программного моделирования, обеспечивая эконо-
мичное проведение испытаний в лабораторной среде.
См. также
https://www.rohde-schwarz.com/product/smbv100b
Ваша команда R&S