
В системе электропривода для станков с ЧПУ ключевую роль выполняют двигатели. Электрический двигатель – это преобразователь электрической энергии постоянного или переменного тока в механическую энергию. Во фрезерных станках с ЧПУ, режущих плоттерах, 3d принтерах, системах автоматизации и других устройствах они преобразуют сигналы с драйвера во вращательные движения собственного вала.
В машиностроении в большинстве случаев применяют шаговые, серво- и серво-шаговые двигатели. Принцип их действия схож, и многие драйверы могут работать со всеми типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения серводвигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется инкрементальные или абсолютные энкодеры. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении. Серво-шаговые двигатели сочетают в себе все преимущества шаговых и серводвигателей. Сегодня подробно разберем шаговый тип двигателей.
Шаговый двигатель
Это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Вал шагового электродвигателя не находится в постоянном вращении, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название.
Устройство ШД
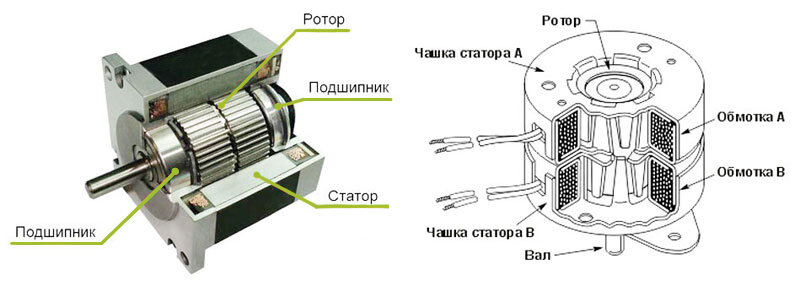
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Принцип действия
Конструктивные особенности шаговых двигателей могут отличаться в зависимости от типа мотора, но общий принцип действия почти неизменный. На статоре расположены четыре обмотки под прямым углом относительно друг друга. Как только на первую обмотку подается напряжение, ротор перемещается на 90 градусов. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжит вращение до прохождения полного круга. После чего цикл повторится снова. Если изменить очередность подачи импульсов в обмотки, направление вращения изменится.
Виды ШД по полярности и типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме обмотки подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше, чем в униполярных. Униполярные электродвигатели гораздо более удобны в управлении.
Виды ШД по типу ротора
Выделяют следующие разновидности шагового двигателя:
- с постоянными магнитами (ротор из магнито-твёрдого материала). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
- реактивный (ротор из магнито-мягкого материала) имеет несколько полюсов на статоре и ротор зубчатой формы из магнито-мягкого материала. Намагниченность ротора отсутствует. Например, ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов.
- Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 градусов.).
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8 или даже 0,9 градусов на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции. Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя.
Управление ШД
Управление шаговыми двигателями может производится одним из следующих методов:
Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка, то крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Преимущества и недостатки ШД
- Главное преимущество шаговых приводов – точность. При подаче потенциалов на обмотки шаговый двигатель повернётся строго на определённый угол.
- Высокие скорости пуска, остановки, реверса.
- Четкая фиксация положения после остановки.
- Высокая точность позиционирования, без жестких требований к наличию обратной связи.
- Высокая надежность за счет отсутствия коллектора.
- Поддержание максимального крутящего момента на низких скоростях.
- Стоимость шаговых приводов в среднем в 1,5—2 раза ниже сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
- Можно отметить также длительный срок службы.
К недостаткам ШД можно отнести:
- Нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя или при кратковременном отключении электропитания.
- Вероятность резонанса.
- Невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.