Изобретатели разработали уникальное шасси, которое позволяет орнитоптерам с машущими крыльями приземляться, как птицы.
Хотя птица, сидящая на ветке, кажется простым делом, сам процесс посадки на самом деле требует сложного баланса времени, ударных сил, скорости и точности. Из-за этого ни один орнитоптер с машущими крыльями до сих пор не смог освоить это движение.
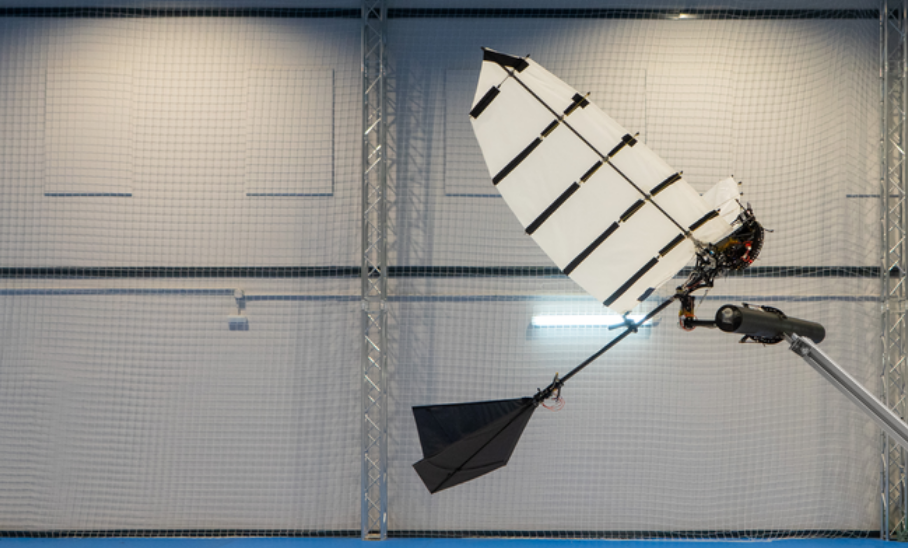
Исследователи из Швейцарского федерального технологического института в Лозанне разработали уникальное шасси, которое теперь делает посадку возможной. Он был построен и протестирован в сотрудничестве с коллегами из Университета Севильи, где 700-граммовый орнитоптер был разработан в рамках европейского проекта GRIFFIN.
Работа ‘Как орнитоптеры могут автономно садиться на ветку’ опубликована в журнале Nature Communications.
Преимущества способности садиться
“Это первая фаза более крупного проекта. Как только орнитоптер освоит автономную посадку на ветку дерева, у него появится потенциал для выполнения конкретных задач, таких как незаметный сбор биологических образцов или измерений с дерева. В конце концов, он может даже приземлиться на искусственные сооружения, что может открыть новые области применения ”, - сказал Рафаэль Зуфферей, аспирант Лаборатории интеллектуальных систем (LIS) и Biorobotics ab (BioRob) в Инженерной школе и первый автор исследования.
Возможность приземляться на насест может обеспечить более эффективный способ подзарядки орнитоптеров, у которых ограниченное время автономной работы, с использованием солнечной энергии, что потенциально делает их идеальными для полетов на большие расстояния.
“Это большой шаг к использованию роботов с машущими крыльями, которые на данный момент могут выполнять только свободные полеты, для выполнения манипуляционных задач и других реальных приложений”, - добавил Зуфферей.
Модификация орнитоптеров
Команда учитывала множество факторов, чтобы орнитоптер мог садиться на насест без каких-либо внешних команд. Например, орнитоптер должен был иметь возможность значительно замедляться при посадке, сохраняя при этом полет, а клешня должна была быть достаточно сильной, чтобы хвататься за насест и выдерживать вес робота, но при этом не быть настолько тяжелой, чтобы ее нельзя было поднять.
“Это одна из причин, по которой мы выбрали один коготь, а не два”, - заявил Зуфферей.
Робот также должен был иметь возможность воспринимать окружающую среду и насест перед ним в зависимости от его собственного положения, скорости и траектории.
Для достижения этой цели орнитоптер был оснащен полностью бортовым компьютером и навигационной системой, которая была дополнена внешней системой захвата движения, помогающей ему определять свое местоположение. Клешня была откалибрована так, чтобы уравновешивать колебания вверх-вниз при полете, когда он пытается закрепиться и ухватиться за насест, и была разработана для поглощения поступательного движения робота при ударе и быстрого и прочного закрытия, чтобы выдержать его вес. После приземления робот должен оставаться на насесте без затрат энергии.