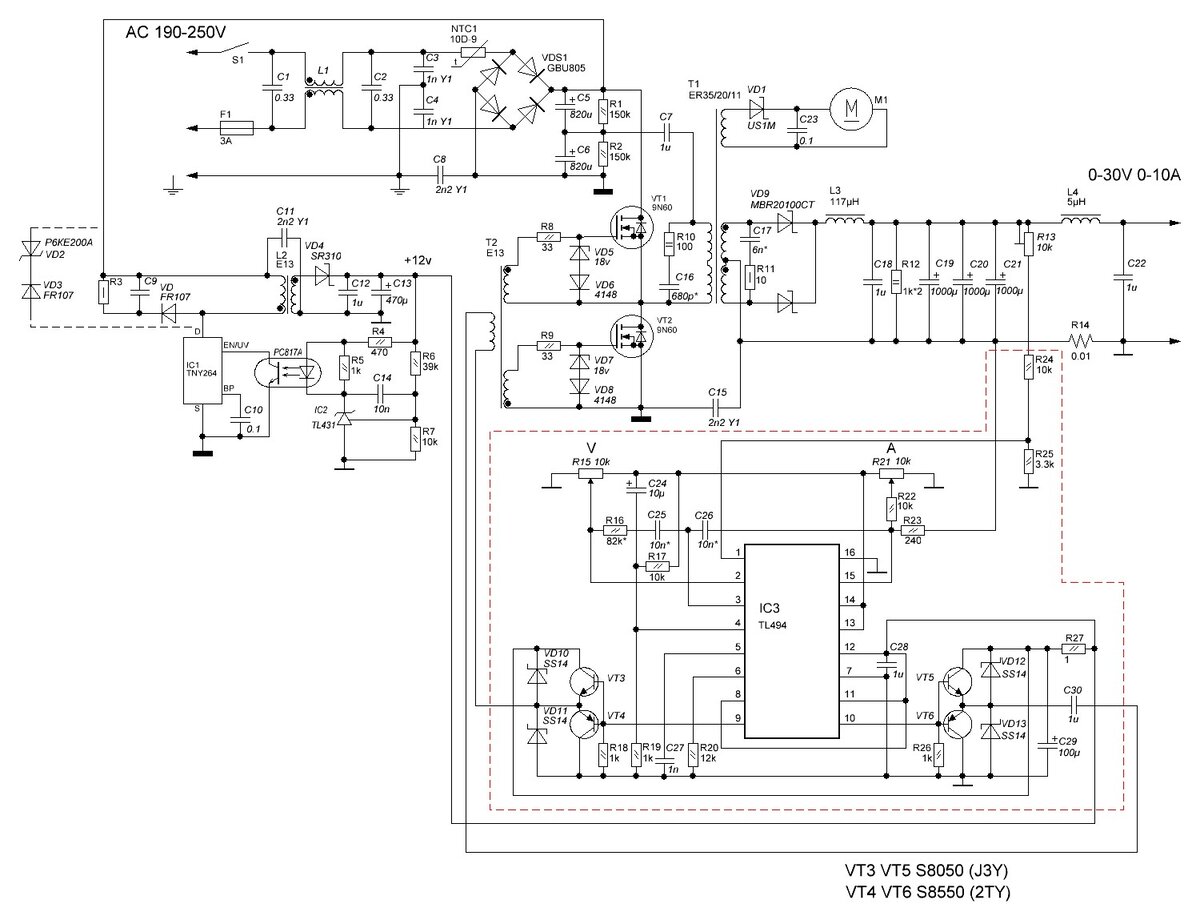
Всем привет. В этой статье реализуем лабораторный блок питания (далее ЛБП) на ШИМ контролере TL494. Блоки подобного типа являются неотъемлемой частью мастерской радиолюбителя и имея свои плюсы и минусы, практически, покрывают 90 % потребности в питании самоделок и ремонте. В настоящий момент промышленные ЛБП, с хорошими характеристиками, стали доступны а с развитием электроники и топологий иип, они мало чем уступают линейным ЛБП. И в каком то смысле, заниматься самому сборкой качественного ЛБП, в виду того что просто выйдет дороже пром сборки, становиться бессмысленно. По этой причине я взял за основу не дорогую реализацию подобного ЛБП и основной упор внимания уделил на низкий уровень шума, надежность, КПД и себестоимость. Схема :
Основные расчеты полумостового прямохода я приводил в статье . Отличие компонентов от расчетного, связано с отсутствием необходимых номиналов. Здесь рассмотрим и просчитаем ново введения. Что-бы не растягивать статью, я разделю ЛБП по блокам.
Определимся с тех. заданием:
Диапазон входного напряжения.
VAC 190-250
Диапазон регулировки выходного напряжения и токовой защиты.
0-30 V 0-10 А
Приводить остальные характеристики для ЛБП, такие как температурный дрейв, восстановление и т.д. я не буду, целью не стоит *тягаться* с проф. приборами. В конце статьи я выложу осциллограммы.
Дежурка: Основные расчеты обратноходового иип я приводил в статье . Здесь применил простой драйвер с минимальной обвязкой TinySwitch . Микросхема не совсем контроллер и работает в режиме старт/стоп в зависимости от напряжения ОС и в тоже время на ее *борту* предусмотрены все защиты. Во время паузы питается от напряжения байпасного конденсатора вывода ВР. Частота работы 132 кГц, что позволяет использовать не большие дроссели. Я применил трансформатор от блока АТХ Е16. Первичка 150 витков провода 0.2 с разделением на две части, для снижения рассеяния и вторичка 12 витков провода 0.2 в 3 жилы. Необходимая индуктивность первички 4.360 мГн (возможно небольшое отклонение, регулируется зазором дросселя) В качестве снаббера применил супрессор Р6КЕ200А. ( на печати макросы под стандартный снаббер ) Выбирается исходя из, напряжение стабилизации должно быть выше отраженного напряжения первичной обмотки+падение на диоде: (отраженное напряжение это напряжение вторички *отраженное* путем коэф. трансформации в первичную обмотку на обратном ходу)
K=150/12=12.5 отраженное напряжение = 12.5*12+0.5=150.5 Вольт.
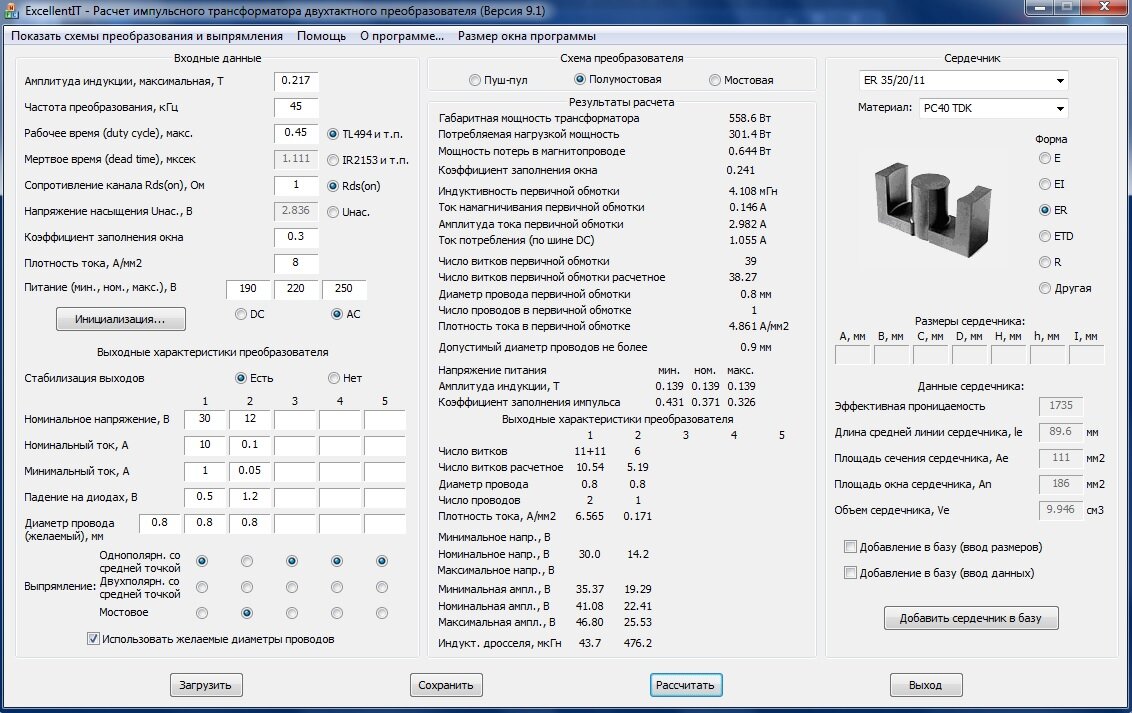
Силовой контур: Применение электролитов С5 С6 в паре с резисторами R1 R2 нормализует половину напряжения питания делителя, компенсируя погрешности конденсаторов. Конденсатор С7 *отсекает* постоянное напряжение. Диоды VD6 VD8 в паре со стабилитроном VD5 VD7 обеспечивают защиту от эффекта Миллера. Диоды закрывают возможность короткого замыкания при отрицательной полуволне ТГР. Силовой трансформатор Т1 рассчитывал по программе Владимира Денисенко.
Кулер: Однополупериодный выпрямитель в паре с небольшой емкостью С23 позволяет регулировать мощность исходя из заполнения ШИМ, который меняется в зависимости от нагрузки. Тем самым я исключил перегрев радиатора и бюджетно решил проблему охлаждения.
ТГР: (трансформатор гальванической развязки) или GDT ( Gate Drive Transformer) Здесь стоит чуть остановиться. При выборе витков и материала ТГР это всегда поиск компромиссов. В первую очередь он должен обеспечивать необходимым током заряд затвора и не затягивать фронты импульса. Основную формулу расчета я приводил в статье:
Np=Vin(min)*Dmax/2*ДB*Ae*f
КТР выбирается 1.1 , Здесь надо понимать что размах индукции(ДВ), если мы возьмем ближе к 0.3 - перегрузим транзисторы *раскачки* ТГР в тоже время получим *хороший* токовый сигнал, с другой стороны слишком увеличив витки - увеличим и рассеяние ТГР что приведет к *размазыванию* сигнала ШИМ. Таким образом меры по снижению паразитных составляющих трансформатора ТГР должны быть определяющими при выборе. Здесь надо исходить из правил:
Высокий коэффициент связи обмотки.(оптимально использовать трифилярную обмотку)
Высокая проницаемость сердечника.( Чем больше проницаемость, тем меньше паразитка индуктивности)
Также нужно учитывать индукцию насыщения сердечника при определении кол-ва витков. Я использую тороидальные сердечники проницаемостью 9 тыс мю. В моем случае по 17 витков изолированным проводом трифилярной намоткой, форма сигнала на затворах:
Формула для определения Ае (площадь сечения) тороидального сердечника:
Конденсатор С30 определяет средний намагничивающий ток ТГР равным нулю. Из практики, в некоторых случаях он может с резонировать с индуктивностью ТГР и необходимо менять номинал. Диоды VD10-13 *отсекают* выбросы паразитки ТГР. Цепочка фильтра R27 C29 минимизирует влияние силового каскада на работу контроллера.
Индуктивность L3: Основную формулу расчета я приводил в статье, но, период (Т) надо делить надвое для двух полупериодного выпрямителя.
ШИМ контроллер TL494: Работу контроллера я описывать не буду, все есть в интернете. Остановимся на некоторых моментах. Мертвое время (ДТ) или фаза покоя, рассчитывается исходя из соотношения делителя напряжения резисторов R19-17 и в даташит приводиться таблицей в процентах:
Софт-старт задается емкостью С24 которая в начальный момент запуска сокращает длительность импульса. Если за время запуска примем 50 тактов частоты переключения а период у нас - T=1/f=1/45= 22 мкс то :
С=T*start time/R19 = 22*50/1=1.1 мкф (в наличии у меня нет)
Коррекция ОС: Для простоты понимания как это работает можно представить себе что мы движемся по заснеженной дороге на задне приводной ВАЗ 06, у которой отсутствует *буржуйский* ABC ). Попав на лед нас начинает заносить, нажав резко педаль тормоза - бросает в разные стороны дороги(с определенной частотой), может просто выкинуть в кювет и мы бросаем педаль, выруливая и тормозя двигателем. Что в переводе - реактивные элементы выходного фильтра, которые вносят смешение тока от напряжения при переменном токе в нагрузке( это наша заснеженная дорога и лед) наша отрицательная обратная связь может превратится в положительную при большом коэф. усиления( выкидывает в кювет резко нажав тормоз) поэтому КУ операционных усилителей ТL494 небольшой. И для *выруливания* вводиться частотная коррекция ОУ, на схеме R16, С25, С26. При не отстроенной коррекции ОС сигнал на выходе под нагрузкой мы можем увидеть таким:
Логика работы ОУ TL494 (операционный усилитель) за счет диодов на выходе схожа с логическим элементом ИЛИ. По этой причине применил ОУ с разным управлением по току и напряжению с учетом рекомендаций даташит.
Меры борьбы с ЭМИ: Эту тему можно развить не на одну статью, поэтому я задену только те моменты, которые учел при постройке этого ЛБП. Подбор снаббера R10 C16 я приводил в статье . Цепочка снабера R11 C17. Дело в том что барьерная емкость диода в паре индуктивностью рассеяния вторички трансформатора образуют колебательный контур ,что приводит к большим импульсам выброса при переключении:
В подборе цепочки снаббера *успокоителя* я использовал лавсановую емкость. Силовые транзисторы и вых. диод выбраны в пластмассовом корпусе - дело в том что между железным корпусом и радиатором образуется емкость через которую *проскакивают* паразитные высокочастотные помехи. Емкость С8 уменьшает паразитные токи путем сокращения внутреннего контура. Печать сделана с учетом рекомендаций разделения контуров и импеданса. Провода к потенциометрам регулировки применил с экранировкой. Трансформаторы экранированы и зашунтированы ёмкостью.
Преобразователь выглядит так :
Холостой ход:
Нагрузка 10 А:
Ну и напоследок не большой фокус)
Печать, схема и небольшой документ по настройке ТГР здесь.
Всем Спасибо.