Другие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Замена рамы, OSD-меню и тест времени, PID, Проблемы при запуске, Калибровки и режимы, Настройка моторов, Проблемы размещения, Порт приёмника, ELRS, Прошивка контроллера, Запчасти
Предыдущую раму KK260 я списал в утиль как непригодную для серьёзной работы.
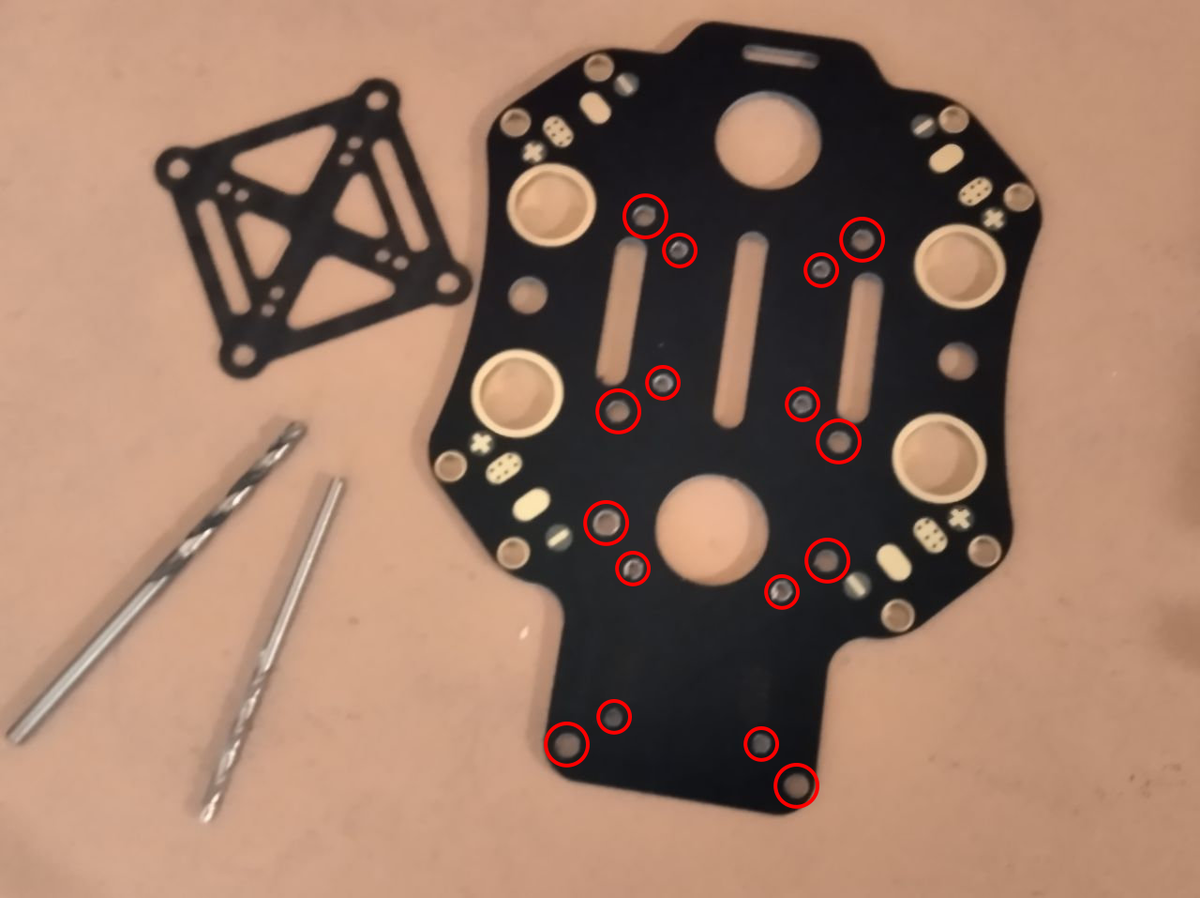
Раму Q250 пришлось тоже доработать, просверлив места под стек 30.5*30.5 и 20*20, но что самое прикольное, в ней можно разместить ещё два таких же стека:
Лучи у этой рамы "пустые", поэтому нормально на них регуляторы не разместить – будут болтаться. Так что регуляторы я переместил на задние торцы лучей, они там удобно укладываются на двусторонний скотч и дополнительно можно притянуть стяжками:

У моторов были коротко обрезаны провода, мне было лень их наращивать, и поэтому я взял другие, старые, с уже нарощенными проводами: Tarot MT2208 1500KV.
По характеристикам практически такие же. Крепление у них нестандартное, винтами М2.5, но специальные винты с "плечом" позволяют это сделать.
Двухстековое размещение выглядит комфортней. Видеопередатчик будет больше доступен для обдува:
Собственно, вся сборка, и коптер практически готов:
Полётный контроллер я развернул правильной стороной вперёд, так как теперь доступ к USB осуществляется как обычно сбоку. Исправил настройку ориентации гироскопа и порядка моторов в миксере на стандартные. И коптер полетел как и раньше. На 3S2P 18650 чувствует себя несколько тяжеловато, расчётное время полёта порядка 35 минут, но думаю, что оптимальнее будет 4S1P на элементах 21700. Тесты последуют.
Пока что осталось закрепить приёмник, установить видеоантенну, камеру, компас, барометр и GPS. С этим проблем не будет, рама гораздо более вменяемая, чем KK260.
Читайте дальше: