Координаты источников излучения можно определять, используя тригонометрические теоремы треугольника: теорему синусов, косинусов, тангенсов, котангенсов.
Рассмотрим способ определения КМП ИРИ на основе теоремы косинусов, произведя измерения с помощью РПУ, низкочастотный выход которого оцифровывают и десятикратно усредняют по максимуму сигнала, соответствующего азимуту или пеленгу на ИРИ. Для иллюстрации способа приведена рис.1.
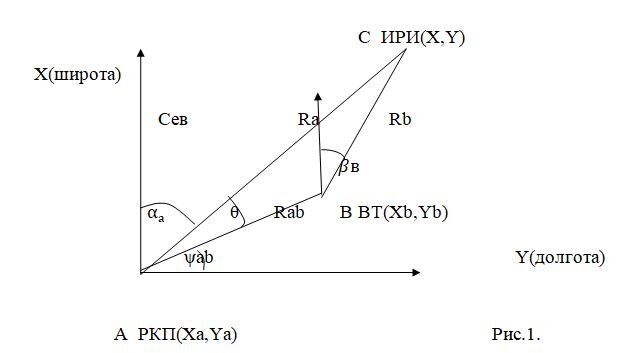
Рис.1.Расположение РКП в точке А ( , ),ВТ ( , ) в точке В и искомого ИРИ в точке С (х,у), азимутальные углы: измеренный - ,вычисленный- .
Figure 1: The location of the RCP at point A (x_a, y_a), BT (x_b, y_b) at point B and the desired IRI at point C (x, y), azimuthal angles: measured - αa, calculated – ψab.
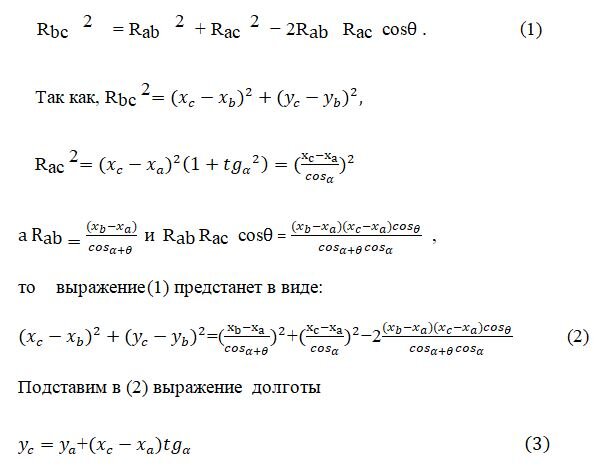
Координаты местоположения ИРИ на плоскости в декартовой системе координат задают широтой и долготой. При измерении азимута на ИРИ достаточно вычислить только широту или долготу местоположения, а, следовательно, для определения одной координаты нужно составить лишь одно уравнение. Составим такое уравнение для определения КМП ИРИ, задав координаты вершин А(𝑥а ≠ 0, уа ≠ 0) и В(𝑥𝑏 ≠ 0, у𝑏 ≠0) и используя теорему косинусов треугольника, представленную в виде:
Полученные результаты, в качестве примера, представлены в виде графиков (см. фиг.3-фиг.4) зависимости вычисленных и истинных расстояний от РКП до ИРИ от измеренных азимутов. В качестве истинных расстояний приняты расстояния до РЭС, получаемые из базы данных используемого РКП (так называемые базовые РЭС- БРЭС). Зависимости представлены для двух наборов азимутов на искомые ИРИ: от -15 до -10,5,,град и от -30 до -26,5 град. Точки пересечения зависимостей вычисленных и истинных расстояний от РКП до ИРИ от измеренных азимутов соответствуют истинным расстояниям искомых ИРИ до РКП. Их фиксируют, как искомые координаты местоположения ИРИ. Выполнены и оценки погрешностей вычисления расстояний для 5 диапазонов входных азимутов, приведенные в таблице 1.Для получения задаваемого относительного уровня разброса входных азимутов и вычисленных по ним выходных расстояний до ИРИ, рассчитываются коэффициенты вариации, которые представляют частное от деления: среднеквадратическое отклонение на среднее арифметическое значение этих же величин.Формула коэффициентов вариации в Excel выглядит следующим образом:
СтандОтклон (диапазон значений) / СрЗнач (диапазон значений)
В таблице 1 приведены результаты вычисления этих коэффициентов вариации, которые, при оценке вариации вычисленных расстояний от РКП до МПИРИ, не превышают 5%.
Результаты определения параметров МП ИРИ передают на смежные однопозиционные определители комплекса с помощью БПЛА и получают обратно от смежных определителей подобные же результаты вычислений об этом и других искомых ИРИ для проведения уже двух и многопозиционных комплексных вычислений. Двухпозиционное определение в комплексе по результатам азимутальных измерений состоит в в вычислении КМПИРИ как точки пересечения двух азимутальных линий. На фиг.5. показано получение точки этих пересечений с координатами:
Аналогичное решение получают и при поступлении сведений от других однопозиционных определителей.
При получении от смежных определителей комплекса результатов измерения напряженности поля КМПИРИ вычисляется по разностно-относительному способу [10,11], в котором место ВП занимает смежный РКП, откуда получены результаты измерения напряженности поля искомого ИРИ. Опишем этот способ с такой заменой.
Вычисляют отношение напряженностей поля РКП1 и РКП2 и расстояний и и на их основе получают разностно-относительное уравнение:
При поступлении сведений от других однопозиционных определителей усредняют и фиксируют после этого их, как окончательные координаты местоположения искомого ИРИ.
При поступлении на однопозиционный определитель сведений об азимуте и результатах измерений напряженности, создаваемой одним ИРИ в двух других смежных до него и координаты можно определить по точке пересечения двух окружностей Аполлония Пергского,, на которую указывают измеренныые азимуты, приведенные для пояснения на фиг.6 и являющиеся окружностями отношений квадратов радиусов исходных окружностей положения ИРИ этих двух смежных . При поступлении же на однопозиционный определитель сведений о результатах измерений напряженности, создаваемой одним искомым ИРИ в трёх других смежных до искомого ИРИ и его координаты определяют как радикальный центр (см.фиг.7) четырех окружностей Аполлония [11]. В завершение приведем табл.2 зависимости количества способов определения параметров МПИРИ от количества однопозиционных определителей.
Литература.
1. Липатников В. А.,Соломатин А. И.,Терентьев А. В.адиопеленгация. Теория и практика. — Спб. : ВАС, 2006. —
2.Вавилов С. И. Большая советская энциклопедия / под ред. Б.А. Введенского, С. И. Вавилова. — Изд. 2-е. Т. 31. — М.: Научное издательство «Большая Советская энциклопедия», 1950–1958.
3.. О возможности однопозиционного определения дистанции до объекта в пассивном режиме работы радиотелескопа. Авторы: Рудинский А.В. Шенгелия М.В. Научный журнал.Фундаментальные исследованияISSN 1812-7339"Перечень" ВАК. ИФ РИНЦ 1,074
4.Малышкин Е. А., Пассивная: радиолокация, М., 1961;
5. Черняк В. С. Многопозиционная радиолокация / В. С. Черняк - М.:
Радио и связь, 1993. - 416 с.
6. Логинов Ю. И. Способы пассивной радиолокации.
Издательство «Бук». г. Казань,2019. 378с