Сотрудники Итальянского технологического института (IIT) под руководством Николаоса Цагаракиса создали функциональный прототип робота MARM. Название — аббревиатура Multi-Arm Relocatable Manipulator (рус. многорукий перемещаемый манипулятор). Его разработали в рамках проекта Европейского космического агентства MIRROR.
И, хотя робот может выполнять много разных задач, его создали, чтобы он перемещался по внешней стороне космического корабля, устанавливая и/или удаляя орбитальные сменные блоки. Это любые модульные компоненты, которые можно легко заменить по мере необходимости.
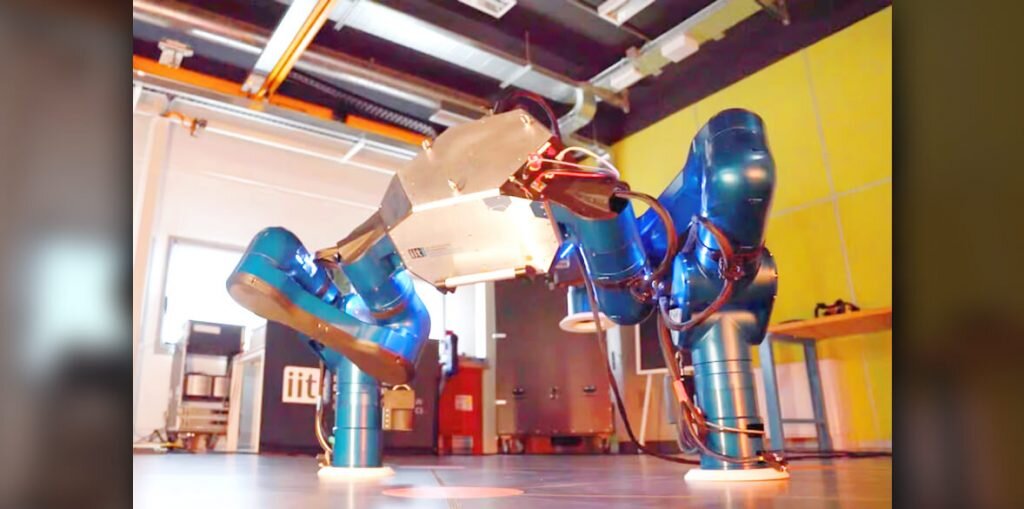
Робот состоит из поворотного основания и трех шарнирных конечностей, которые машина использует как руки и ноги. Фиксирующий механизм в нижней части каждой ноги/руки зацепляет шестиугольные плитки, которые покрывают внешнюю часть большинства космических кораблей, надежно удерживая MARM на месте. Этот же механизм пригодится для отправки/получения данных, используя стыковочные станции снаружи.
Одно из преимуществ конструкции MARM заключается в том, что при ходьбе на трех ногах робот постоянно поддерживает как минимум две точки соприкосновения. Также он легко двигается в любом направлении. Кроме того, при использовании одной конечности и ее подвижного таза для выполнения задачи две другие работают как якори, обеспечивая сверхстабильную операционную платформу.
Читать далее:
17-летний инженер придумал безмагнитный двигатель: его смогут применять в электромобилях
Недалеко от Земли нашли две планеты. Возможно, они обитаемы
Уникальный метеор переписал историю Солнечной системы: откуда он прилетел