
Параметры:
- Входное напряжение: 5 В
- Потребляемый ток в режиме ожидания: до 2 мА
- Потребляемый ток в режиме измерений: до 15 мА
- Частота ультразвука: 40 кГц
- Измеряемая дальность: 3 … 400 см
- Точность измерения: от 0,3 см
- Угол измерения: до 15°
- Рабочая температура: -30 … 80 °С
- Габариты: 45x20x15 мм
Теория.
Ультразвуковой датчик определяет расстояние до объекта. Датчик HC-SR04 генерирует узконаправленный сигнал на частоте 40 кГц и ловит отраженный сигнал (эхо). По времени распространения звука до объекта и обратно можно достаточно точно определить расстояние до него.
По этому же принципу работает множество приборов для исследования пространства — эхолот, сонар, радиолокатор и даже полицейский радар для определения скорости автомобиля. Все эти приборы излучают узконаправленный ультразвуковой сигнал и получают обратно отраженный сигнал. В отличии от инфракрасных дальномеров (IR), на показания ультразвукового датчика (сонара) не влияет цвет объекта.
Подключение к Arduino UNO.
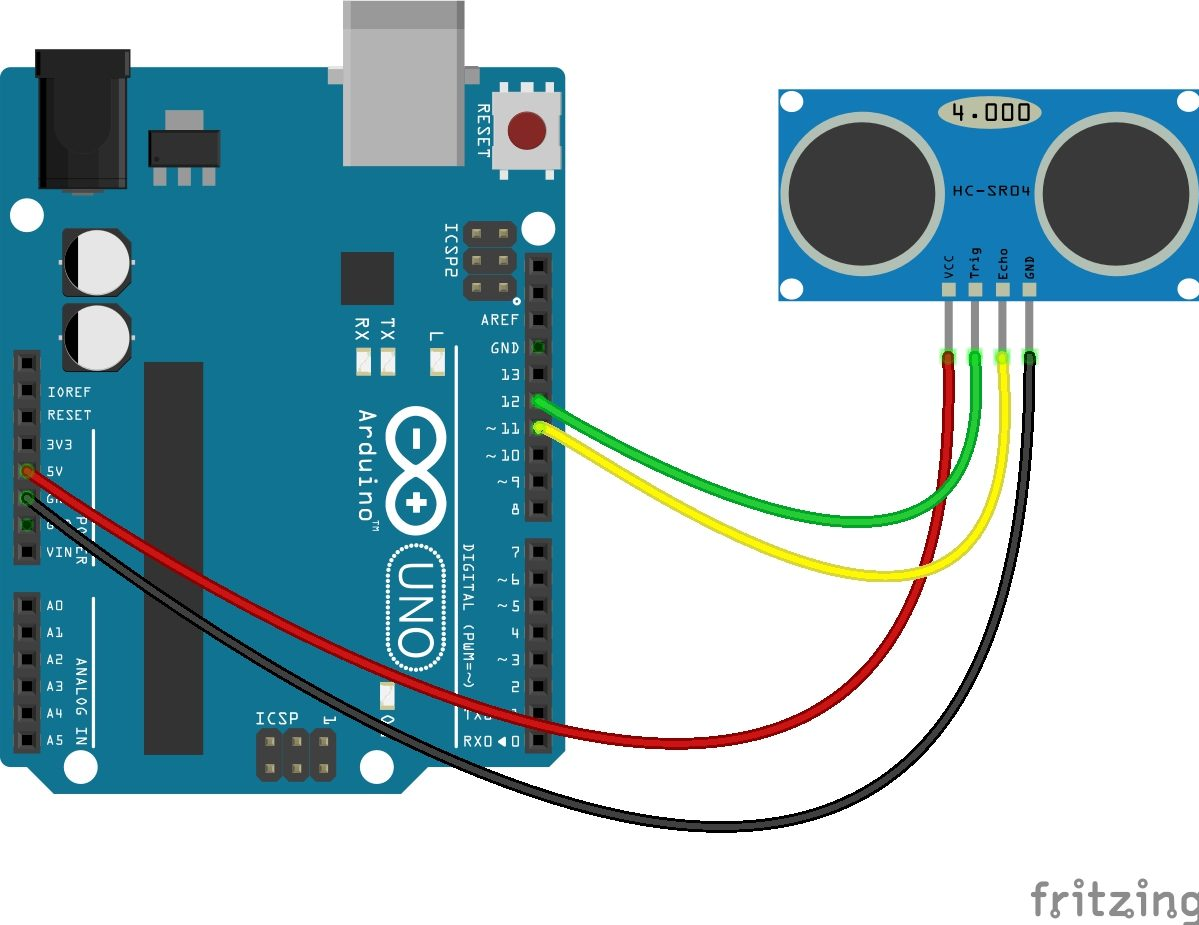
- ПОДКЛЮЧЕНИЕ!
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Схема подключения указана на рисунке выше. Отметим, что ультразвуковой дальномер HC-SR04 имеет диапазон измерения от 2 см до 400 см, работает при температурах от 0° до 60° С. Точность измерения составляет ± 1 см, рабочее напряжение датчика до 5,5 В. Для начала мы используем простой скетч, без использования библиотеки Ultrasonic.
Скетч.
int trigPin = 8; // назначаем имя для Pin8 int echoPin = 9; // назначаем имя для Pin9
void setup() {
Serial.begin (9600); // подключаем монитор порта pinMode(trigPin, OUTPUT); // назначаем trigPin (Pin8), как выход pinMode(echoPin, INPUT); // назначаем echoPin (Pin9), как вход }
void loop() {
int duration, cm; // назначаем переменную "cm" и "duration" для показаний датчика digitalWrite(trigPin, LOW); // изначально датчик не посылает сигнал delayMicroseconds(2); // ставим задержку в 2 микросекунд
digitalWrite(trigPin, HIGH); // посылаем сигнал delayMicroseconds(10); // ставим задержку в 10 микросекунд digitalWrite(trigPin, LOW); // выключаем сигнал
duration = pulseIn(echoPin, HIGH); // включаем прием сигнала
cm = duration / 58; // вычисляем расстояние в сантиметрах
Serial.print(cm); // выводим расстояние в сантиметрах Serial.println(" cm");
delay(1000); // ставим паузу в 1 секунду }
Вывод.
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.