
Как известно, для регулировки скорости вращения электродвигателя применяют либо векторное, либо скалярное управление.
Скалярное управление
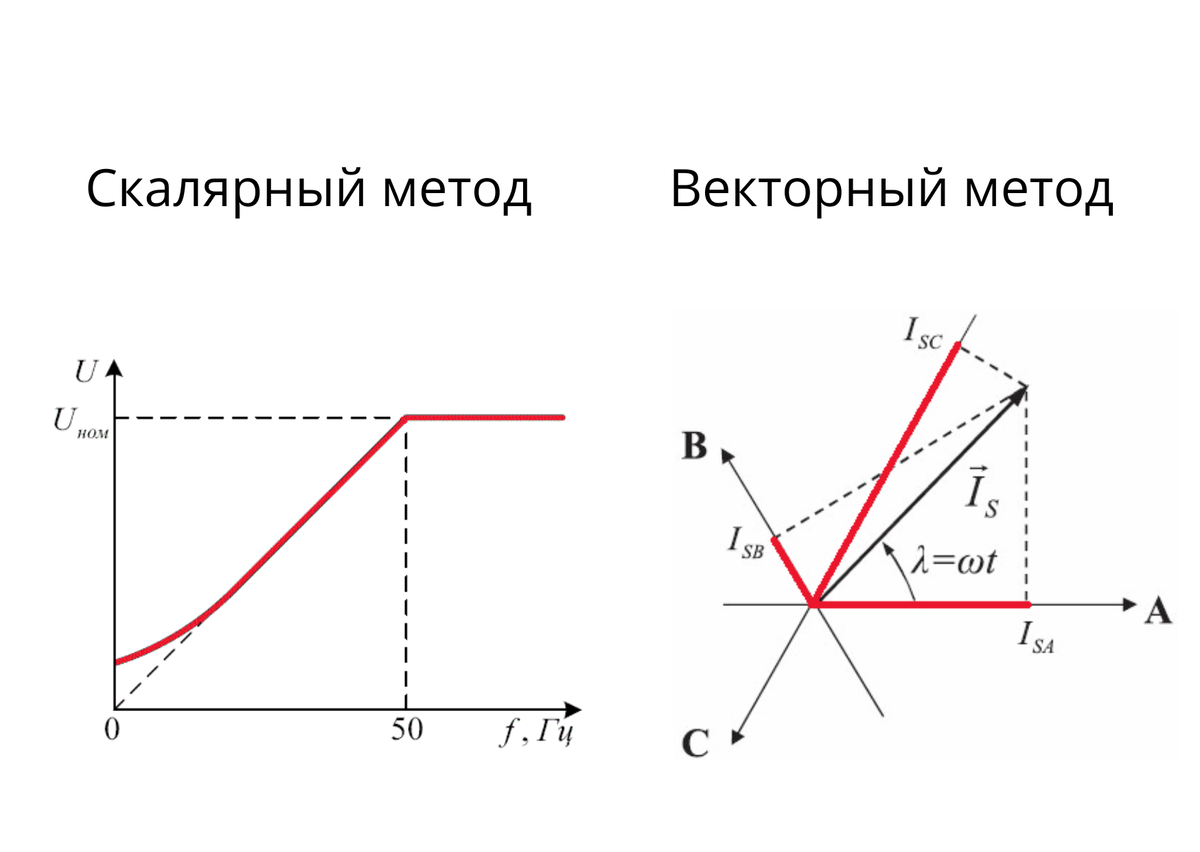
Скалярный метод - это поддержание постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль только за величиной питающего напряжения и его частотой. Если повышаем частоту, то напряжение при этом пропорционально повышается в зависимости от нагрузочной характеристики данного двигателя. Скалярное управление оптимально для обычных асинхронных двигателей, и подходит там, где зависимость скольжения от нагрузки не является критичной. Когда достаточно для работы минимального набора функциональных параметров, и в отсутствии значительных динамических нагрузок. Таковыми могут являться вентиляционные нагрузки, насосы и т.д. Что особенно важно, при использовании скалярного метода имеется возможность управления несколькими двигателями от одного преобразователя частоты.
Недостатки скалярного метода:
- снижение момента на валу на низких скоростях (возможен перегрев двигателя);
- зависимость скольжения от нагрузки (частота вращения ротора по отношению к магнитному полю статора с ростом нагрузки падает);
Векторное управление
Данный метод дает возможность независимо регулировать как момент на валу, так и скорость вращения вала под нагрузкой, потому что в процессе управления учитываются еще и фазы токов.
Векторный метод позволяет рассчитывать скорость вращения ротора и момент на валу в зависимости от текущих токов фаз (от частоты и величин токов в обмотках статора).
Преимущества векторного типа управления:
- высокая точность управления скоростью вращения ротора даже с динамически изменяющейся нагрузкой на валу. Немаловажно, что при этом больше не требуется датчик скорости, а также отсутствуют рывки;
- плавное и ровное вращение вала на малых скоростях;
- высокий КПД: низкие потери в условиях оптимальных характеристик напряжения питания.
Есть и недостатки в векторном управлении: сложность вычислительных операций и необходимость задавать исходные данные (параметры регулируемого привода).
Вывод
Выбор подходящего метода управления определяют особенности технологического процесса, такие как: точность регулирования; удержание момента на валу двигателя; состояние привода при переходных процессах (пуске/стопе, ускорении, торможении); необходимость группового управления электроприводами.