![Робот с ногами-колёсами может ездить и ходить [ВИДЕО]](https://avatars.dzeninfra.ru/get-zen_doc/5295744/pub_6394a051ee1bc829b5217e7e_6394a054ee1bc829b5217f0c/scale_1200)
Исследователи из Вустерского политехнического института представили роботизированную систему OmniWheg, которая позволяет андроидам трансформировать свои ноги в колёса. Это должно сделать робота более адаптированным при перемещении не только в разнообразной физической среде, но и в социальной.
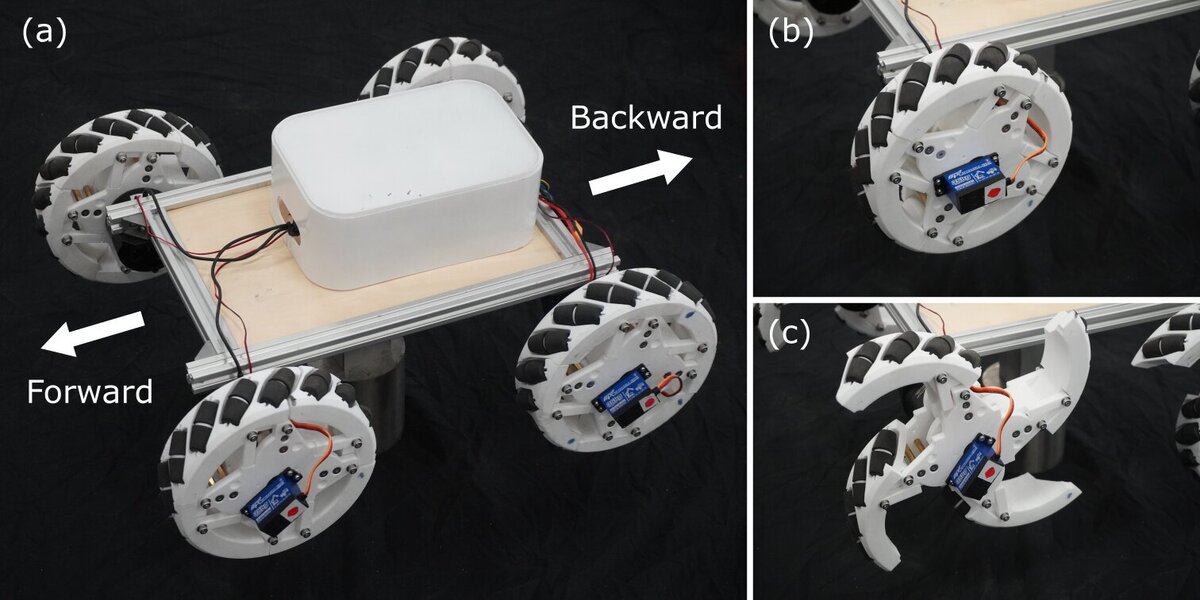
В своём проекте учёные использовали концепцию «whegs» (то есть «ноги-колёса» или «ноги-крылья»), существующую уже свыше десяти лет. Главная проблема данной концепции — трудности координации правой и левой стороны системы «колесо-нога», которые должны быть идеально выровнены, когда робот поднимается по лестнице. Но инженерам удалось её обойти, создав «всенаправленное колесо».
Они провели серию экспериментов, где роботу требовалось преодолеть препятствия, подняться по ступенькам с разной высотой и выполнить повороты и развороты в разных направлениях. Робот успешно выполнил все задачи. Кроме того, ему удавалось двигаться вперёд, назад и в разные стороны с очень низкими затратами энергии, а также умело взбираться по лестнице.
Разработанная система OmniWheg хороша тем, что её можно интегрировать как в существующих, так и в новых роботов, чтобы повысить их эффективность при навигации в помещении.