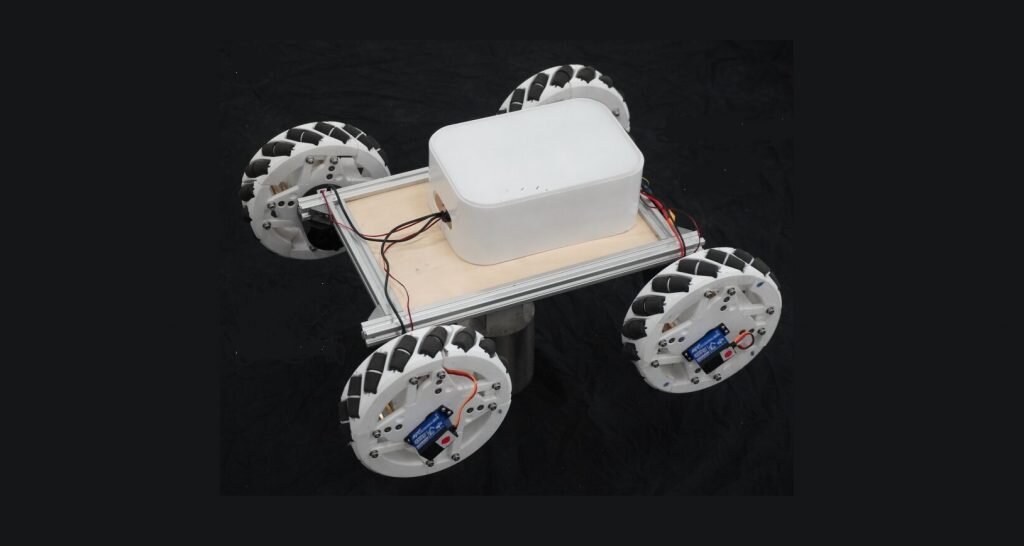
Исследователи из Вустерского политехнического института представили роботизированную систему OmniWheg. Она может адаптировать свою свою конфигурацию при перемещении по окружающей среде, плавно переходя от колесного робота к роботу на ногах.
Ключевая идея ученых заключается в том, что, хотя ноги делают роботов более привлекательными, придавая им черты человека или животного, они не всегда являются оптимальным решением при перемещении. Таким образом, вместо разработки робота с одним механизмом передвижения команда решила создать систему, которая может переключаться между различными механизмами.
В своей работе ученые использовали концепцию «whegs» (т. е. ноги-колеса или ноги-крылья), которая существует уже более десяти лет. Ранее было разработано и испытано несколько систем на подобной технологии, но большинство работали не очень хорошо, отмечают ученые. Главная проблема — трудности координации правой и левой стороны системы «колесо-нога», которые должны быть идеально выровнены, когда робот поднимается по лестнице.
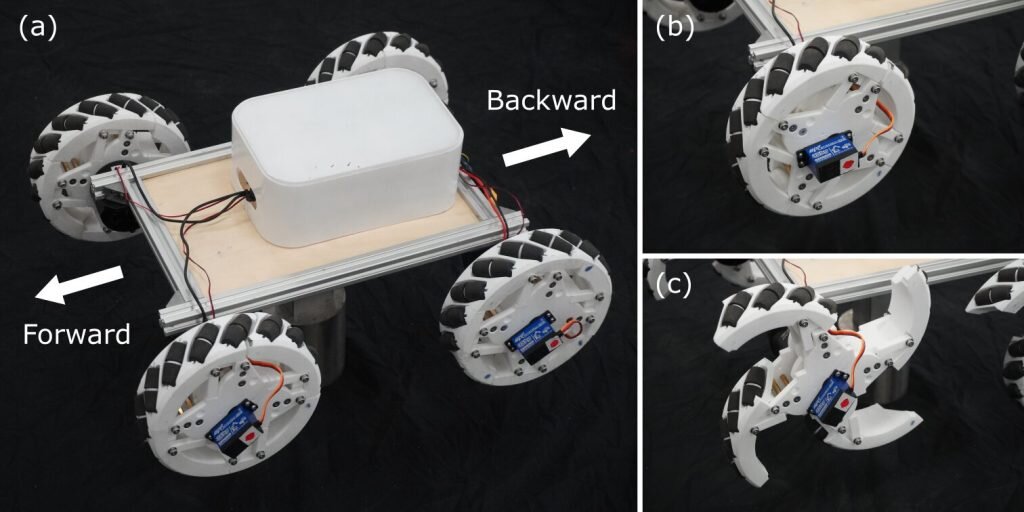
Для решения проблем координации, обычно связанных с механизмами «колесо-нога», мы использовали всенаправленное колесо. Это последняя часть головоломки, поскольку она позволяет роботу выравниваться на лету, не вращая свое тело.
Жусян Цао, соавтор исследования
Исследователи протестировали свою систему в серии экспериментов. Например, устройству требовалось обойти препятствия, подняться по ступенькам с разной высотой и выполнять повороты и развороты в разных направлениях. Робот успешно справился со всеми задачами. Авторы работы отмечают, что новый робот может двигаться вперед, назад и в разные стороны с очень низкими затратами энергии. Кроме того, когда это необходимо он быстро поднимается по лестнице.
Устройство трансформируемого колеса. Изображение: Andre Rosendo and Ruixiang Cao
В будущем система, созданная инженерами, может быть интегрирована как в существующих, так и в новых роботов, чтобы повысить их эффективность при навигации в помещении.
Читать далее:
Яйцо сбросили из космоса: посмотрите, что с ним стало
«Ходячие мертвецы» существовали миллионы лет назад: ученые рассказали, как они появились