Авторы:
ОЛЕЙНИКОВ ВИТАЛИЙ СЕРГЕЕВИЧ
старший преподаватель
ГАВРИЛЕНКО МАРИЯ ИГОРЕВНА,
ЖИРАКОВА ПОЛИНСА СЕРГЕЕВНА,
МАЛИКОВ АЛЕКСАНДР ТИМОФЕЕВИЧ,
МУСТАФИН АРТУР РУСТАМОВИЧ,
ШКАЛИН КИРИЛЛ ПАВЛОВИЧ,
студенты,
Санкт-Петербургский политехнический
университет им. Петра Великого
Научная и инженерная деятельность не обходится без построения формально-информационного описания объекта своего исследования, в связи с чем моделирование процессов является основой для теоретической сферы деятельности.
Наука об идентификации занимается непосредственно построением математических моделей на основе результатов наблюдений за поведением объекта и исследования его свойств.
Предметом исследования являются методы идентификации, использующиеся для построения математических моделей исследуемых объектов. Объектом исследования выступают такие методы, как:
· графоаналитический;
· метод наименьших квадратов;
· метода наискорейшего спуска;
· вещественный интерполяционный метод;
· идентификация полносвязным персептроном.
В данной статье выявлены достоинства и недостатки рассматриваемых методов, а также сделан вывод о целесообразности применения каждого из них в реальных условиях.
Ключевые слова: параметрическая идентификация, переходная характеристика, дискретная система, градиентный спуск, прямое вещественное преобразование, нейронная сеть, полносвязный персептрон.
Key words: parametric identification, transient response, discrete system, gradient descent, direct realistic transformation, neural network, multilayer perceptron.
Работа с реальными объектами в большинстве случаев очень сложна, поэтому в современном мире применяется математическое моделирование.
Получение точной математической модели объекта является актуальной задачей на сегодняшний день, решить которую позволяет идентификация.
Сложность реальных систем растет, следовательно, повышаются требования к используемым алгоритмам идентификации. В настоящее время создано огромное количество методов идентификации линейных объектов, и перед началом построения математической модели необходимо выбрать и изучить подходящий метод, который бы позволил с наибольшей точностью повторить реальное поведение объекта.
Графоаналитический метод: определение передаточной функции по временным характеристикам объекта.
Рассматриваемый метод позволяет по графику, полученному при определенном входном сигнале, определить дифференциальное уравнение заданной структуры и записать его в одной из форм (ДУ или ПФ), т. е. получить модель объекта.
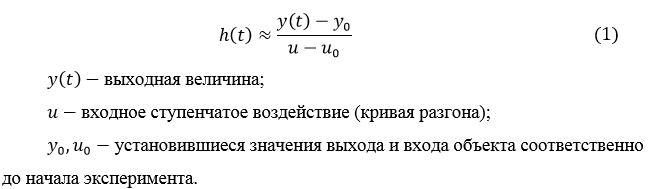
Метод идентификации заключается в определении переходной характеристики h(t) по кривой разгона при ступенчатом входном воздействии:
Во время эксперимента необходимо обеспечить отсутствие случайных возмущений на объект, а также обеспечить точное воспроизведение заданной формы возмущения на входе и дублирование экспериментов по снятию кривой разгона для различных начальных условий, т. е. различных установившихся значений.
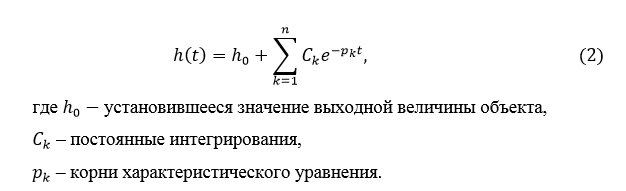
Определение передаточной функции объекта происходит логарифмическим методом, что является предпосылкой для использования аппроксимации h(t) аналитическим выражением типа:
Обобщенный алгоритм идентификации заключается в последовательном вычитании найденной составляющей переходной характеристики и логарифмировании полученного результата. По логарифмической характеристике переходного процесса производится оценка параметров
Если после вычитания и логарифмирования характеристика имеет колебательный характер, следовательно, мы имеем дело с комплексно-сопряжёнными корнями. Тогда составляющая h(t) принимает вид
Это связано с тем, что в некоторый момент времени составляющей
c большими действительными частями можно пренебречь.
Определить фазовый сдвиг можно из условия:
Преимуществом рассматриваемого метода является результат идентификации в аналитическом виде, пригодный для дальнейшей вычислительной обработки и, собственно, простота алгоритма.
Однако стоит учитывать, что метод требует проведения эксперимента в условиях низкого уровня помех и, вследствие этого, не обладает достаточно высокой точностью.
Помимо этого, следует отметить, что метод относится к активной идентификации и поэтому он малоэффективен в режиме нормального функционирования объекта или в замкнутом контуре. А также у графоаналитического метода не существует численного решения и программной реализации.
Метод наименьших квадратов: определение дискретной передаточной функции.
Метод наименьших квадратов (МНК) используется для идентификации дискретных систем. Основная идея заключается в минимизации квадрата разности между значениями выходной характеристики, т. е. расчетной, и исходной. После этого берется производная вектора функционала по параметрам системы, которая представляет из себя СЛАУ, решение которой предоставляет параметры объекта управления.
Достоинства метода:
● Метод прост в реализации;
● Математическая модель в виде СЛАУ;
● Минимальные ошибки.
Недостатки метода:
● Метод применим только для дискретных систем;
● Структура модели должна быть заранее известна;
● Функционал должен быть унимодальным.
Применение на практике:
Данный метод широко используется в экспериментах над объектами управления, например, в задаче параметрической идентификации вентильного двигателя.
Модификации:
Помимо обобщенного МНК, существуют разновидности метода: регрессионный МНК, явный МНК, рекуррентный МНК, а также идентификация объекта по его импульсной характеристике с помощью МНК.
Градиентный метод: идентификация методом наискорейшего спуска
Задачу параметрической идентификации можно рассматривать в качестве задачи отыскания параметров системы, при которых расхождение между моделью было бы минимальным. Иными словами, данную задачу можно свести к отысканию точки в пространстве параметров, в которых значение переходной характеристики модели и исходного объекта было бы равно нулю:
Под функцией f понимается функционал, заданный на вещественном пространстве, численно характеризующий ошибку оценки нашей модели.
Для решения задач отыскания локального минимума применяются градиентные методы, которые основываются на построении минимизирующей последовательности точек по формуле:
Вектор h(x_n ) – определяет направление движения метода, чаще всего он выбирается как градиент минимизируемой функции.
Величина шага α_n≥0 может быть как фиксированной α_n=const, так и динамически меняющейся α_n=var.
Данный класс методов выделяется на фоне других методов параметрической идентификации из-за высокой точности вычисления коэффициентов модели. Кроме того, это один из немногих методов, позволяющих произвести его реализацию на компьютере с помощью распараллеливания вычислений.
В независимости от всех положительных аспектов, сходимость данного метода определяется выбором его начальных значений и шага. Кроме того, градиентный спуск имеет большую вычислительную сложность, так как требует численного вычисления градиента функции в каждой точке приближающей последовательности.
Вещественный интерполяционный метод (ВИМ)
Метод основан на использовании частного случая интегрального преобразования Лапласа, когда комплексная переменная 𝑝 = 𝛿+𝑗𝜔 вырождается в вещественную 𝜔. Формула прямого вещественного преобразования связывает функцию-оригинал 𝑓(𝑡) с изображением 𝐹(𝛿) и имеет вид:
Главные особенности такого перехода:
1. Возможность перехода от описания объекта в виде непрерывной функции F(δ) к однозначному дискретному представлению F(δ_i),i = 1,2,...,η.
2. Взаимно однозначный переход между моделями F(δ) и F(δ_i), i = 1,2,...,η.
Для решения задач идентификации с использованием данного метода необходимо решить уравнение 1 и найти матрицу 𝐴.
Параметры δ подбираются самостоятельно исходя из следующей формулы:
В задачах идентификации вещественно интерполяционный метод имеет ряд полезных свойств.
Данный метод имеет численное решение.
Алгоритм решения является простым и легко реализуемым.
Алгоритм эффективен по памяти и времени выполнения.
Метод имеет хорошую точность.
Работа только с вещественными числами.
К недостаткам можно отнести отсутствие четкого правила выбора начальных параметров 𝛿.
Нейронные сети: определение характера переходного процесса с использованием полносвязного персептрона.
В задачах идентификации так же может применяться искусственная нейронная сеть прямого распространения (многослойный персептрон). Обучение нейронной сети происходит согласно методу обратного распространения ошибки. Его суть заключается в минимизации функционала на множестве весов w_nij:
В качестве функции активации может использоваться сигмоида, вход i-го нейрона n-го слоя определяется выражением:
Видно, что изменение функционала в зависимости от изменения веса складывается из ошибки, производной функции активации и выхода предыдущего слоя.
Плюсы данного метода весомы:
● Выполненные тесты показывают высокую сходимость с переходной характеристикой целевой модели;
● Обученная сеть позволяет прогнозировать поведение звена при различных входах.
Однако есть существенные минусы:
● Обучение происходит на огромном количестве тестовых выборок (от 500 и более), что приводит к долгим нецелесообразным вычислениям;
● Обученная модель не является универсальной и требует обработки входных данных;
● В итоге мы не получаем математическую модель звена, а лишь ее «двойник».
В данной статье не рассматривались вопросы идентификации нелинейных объектов, найти информацию об этом можно в [5, 6].
Обзор методов проведен с целью ознакомления читателей с общими методами идентификации применительно к реальным объектам исследования. Графоаналитический метод не имеет четкой алгоритмизации в следствие чего затрудняется его применение на промышленном производстве. Метод полносвязного персептрона требует большой обучаемой выборки данных, и, кроме того, позволяет определить только вид переходного процесса без параметров или аналитического вида математической модели, что не является оптимальным средством идентификации объектов.
Все приведенные методы были программно реализованы и протестированы авторами статьи на различных выборках данных.
В результате сравнительного анализа авторами выделено три наиболее точных и легко реализуемых метода:
● МНК
● Вещественный интерполяционный метод
● Метод градиентного спуска
Отбор методов происходил по их целевой направленности, то есть в зависимости от свойств объектов, отражением которых являются модели определенных классов. Также важным критерием было преодоление требуемого порога точности, с чем данные методы успешно справились.
СПИСОК ЛИТЕРАТУРЫ
1. Дилигенская А.Н. Идентификация объектов управления / А. Н. Дилигенская. –Самара: Изд-во СГТУ, 2009. – 136 с.
2. Поляк Б. Т. Градиентные методы минимизации функционалов, Ж. вычисл. матем. и матем. физ., 1963, том 3, номер 4, 643–653.
3. Осовский С. Нейронные сети для обработки информации / Пер. с польского И.Д. Рудинского. - М.: Финансы и статистика, 2002. - 344 с., стр 112-115.
4. Семенов А. Д., Артамонов Д. В., Брюхачев А. В. Идентификация объектов управления: Учебн. пособие. - Пенза: Изд-во Пенз. гос. ун-та, 2003.-211 с.: ил. 59, табл. -, библиогр. 141 назв.
5. Пугачев, В.С. Оценивание переменных и параметров в дискретных нелинейных системах// Автоматика и телемеханика. 1979. №4. С.39-51.
6. Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное управление сложными динамическими системами. - СПб.: Наука, 2000. - 549 с.
7. Пантюхин Д. В. Нейросестевой метод идентификации одномерного объекта. URL: https://cyberleninka.ru/article/n/neyrosetevoy-metod-identifikatsii-odnomernogo-obekta/viewer(дата обращения: 05.10.2022.)
8. Анисимов А.А. Идентификация электромеханических систем с использованием искусственной нейронной сети. URL:
http://ispu.ru/files/55-58_0.pdf (дата обращения: 05.10.2022.)
9. Щагин А. В., Нгуен Тхань Зыонг, Задача параметрической идентификации методом наименьших квадратов на примере вентильного двигателя. // Инженерный вестник Дона. №8 (2020). URL: https://cyberleninka.ru/article/n/zadacha-parametricheskoy-identifikatsii-metodom-naimenshih-kvadratov-na-primere-ventilnogo-dvigatelya/viewer (дата обращения: 05.10.2022.)