На данный момент можно подвести промежуточные итоги:
- Изготовлены или закуплены все металлические и электронные детали.
- Окончательно собраны два линейных привода на рамах.
- Закончена в первом приближении отладка программы для Arduino. Она выполняет следующие функции:
- Начальная выставка линейного привода.
- Поворот оси склонений на заданный угол в пределах 360 градусов, управление переводом рычага, переключение микрошага.
- Обмен с драйвером ASCOM EQmod через com-порт по протоколу SkyWatcher motor controller, выдача текущих углов, прием команд для реализации режимов slew (вращение с заданной скоростью) и GOTO.
Управление двигателями реализовано в двух прерываниях 15625 Гц и 100Гц и обмен с EQmod ему не мешает, временная диаграмма заполнена не более чем на 20%.
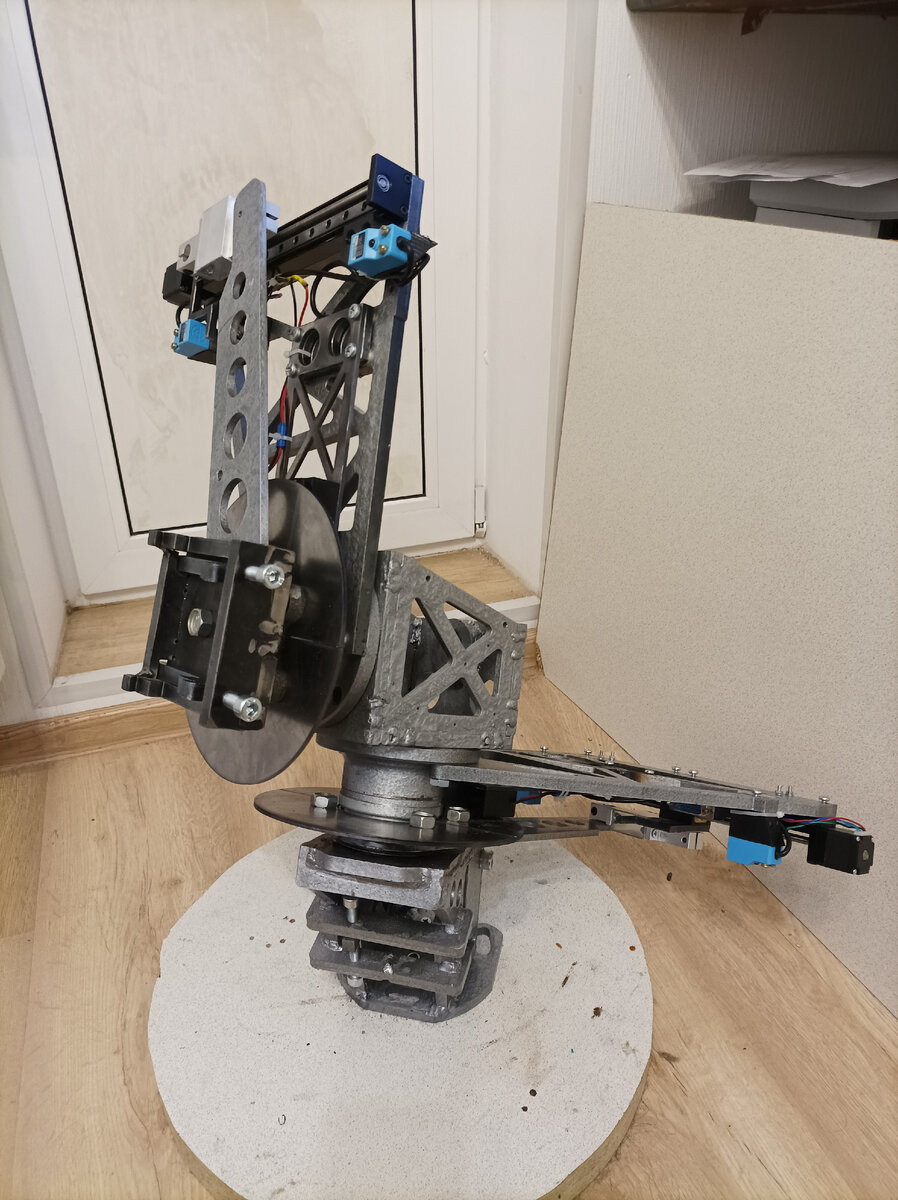
- И наконец монтировка собрана в виде близком к законченному.

Предстоит небольшое допиливание программы, надо скопипастить управление одной осью на другую, назначить соответствующие пины контроллера. И можно проверять работу двух осей, точность наведения и т.п.
Что предстоит:
- Попытаться оптимизировать магнитный тормоз, при включении он смещает ось (проворачивает фрикцион) на угол до 1-3 минут, не так много, но при повороте на большой угол набегает. Радует, что смещение одинаковое в одном и том же положени оси и при точной балансировке с большой нагрузкой стремится к нулю.
- Нарисовать и напечать копус для электроники и кожухи приводов. Первые версии вызвали много замечаний, как выяснилось это дело скурпулезное. Хорошо, что хоть что-то было с самого начала нарисовано и все крепления на железе предусмотрены.
- Таймер в ардуине - так себе, чтобы часовой угол не убегал за пару часов, пришлось ввести поправку почти 0.2%. Надо посмотреть как он себя поведет при -10С на балконе. Еще у меня есть вторая плата Arduino uno, некий клон, там стоит дополнительный кварц, а в первой только керамический резонатор.
- Сделать беспроводное подключение по bluetooth через виртуальный com порт.
- Придумать как определить две неперпендикулярности - 1) осей вращения 2) оси телескопа и оси склонений. Кроме как по звездам пока не придумал.