Несколько дней назад вечером выдалось немного ясного неба. Монтировка стояла на балконе в готовности. Записал положение изображения звезды в кадре камеры в течение 20 минут. Слежение было включено, гидирование ОТКЛЮЧЕНО.
программа PHD guide2;
труба гида 60/240;
камера qhy5Liii ч/б;
Звезду не идентифицировал, время 23 часа, Питер, азимут 225, высота над горизонтом около 45, т.е. в пределах 30 градусов от экватора. Соотношение сигал шум по данным phd2 130db.
Логи из PHD были открыты в Matlab и построены следующие картинки.
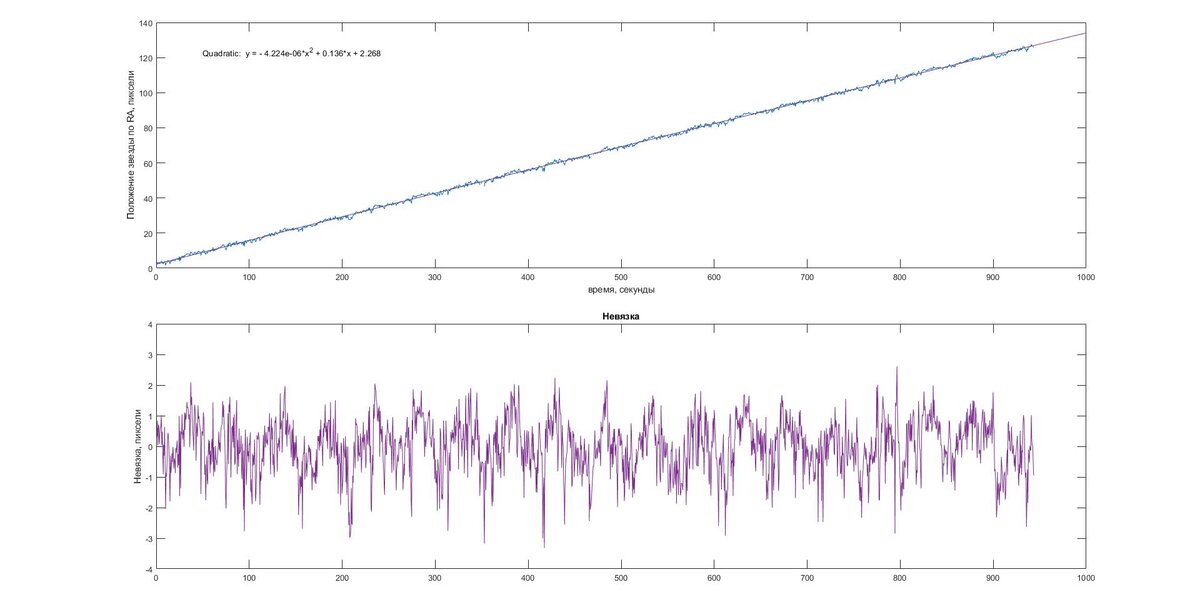
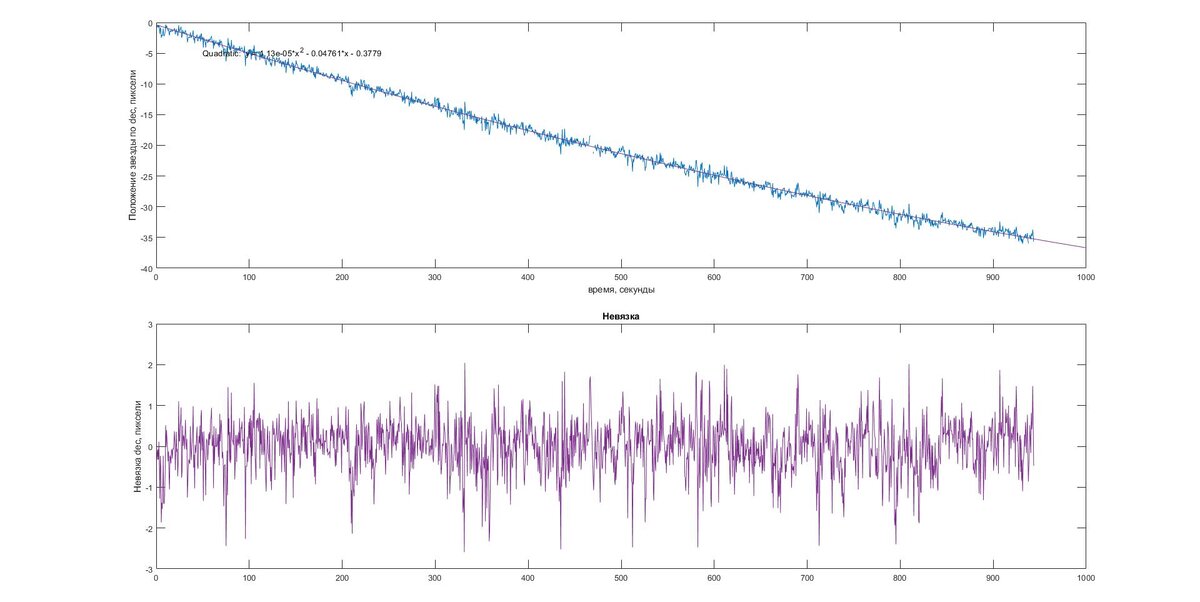
Выводы следующие:
- по наблюдению звезды подтверждено, что периодическая ошибка ведения меньше 3".
- надо повторно записать эти графики, и дополнительно в тот же вечер записать их с неподвижной монтировки, чтобы оценить шум который вносит неспокойния атмосфера, тепло от домов, шумы камеры.
- есть смысл выдумывать оценку и учет периодической ошибки с опорой на сигналы гида, готовые средства, пригаемые к eqmod похоже не годятся, т.к. у меня период оборота винта меняется из-за нелинейности механики.